山东非隧道式汽车面漆检测设备质量好价格忧的厂家
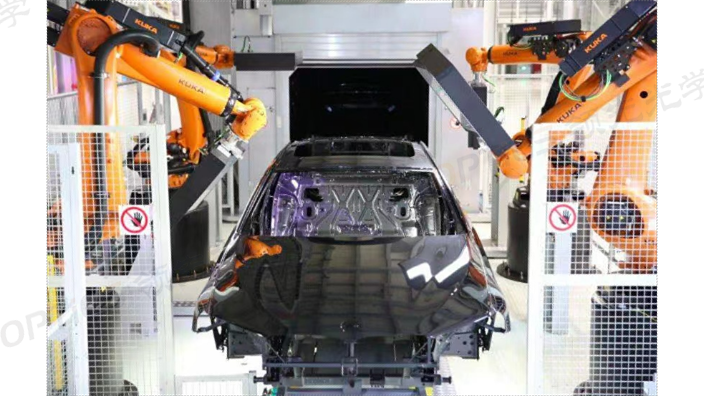
图像处理单元通过使用一系列算法对图片进行处理,获得缺陷3D或2D特征,通过与数据库比对之后,获得缺陷位置、分类、尺寸等信息,然后将数据进行输出。漆膜缺陷自动检测系统构成汽车车身长度一般在~m,宽度在~m,而且车身曲面多,结构比较复杂。为了能将车身外表所有区域都覆盖到,需要增加光源和相机数量或者将光源和相机安装在机器人等可移动设备上,目前研究和应用较多的主要有以下2种结构:1)将光源和CCD相机安装到包围车身的钢结构框架上,通过增加光源和CCD相机数量的方式覆盖整个车身。这种结构的优点是结构简单,调试时只需要调整相机角度,耗时短。缺点是柔性低,不同的车型外形有较大差异时不能通用。2)将光源和CCD相机集成到布置在车身两侧的机器人手臂上,使用2台以上的机器人,可以增加行走轨道扩大检测区域。此结构优点是机器人相对灵活,对车身外表任何区域都可以进行拍摄,柔性高,不同车型可混线检测。缺点就是系统结构复杂,检测一台车的时间相对第一种结构要长。能在40~60JPH的涂装生产线上,用来检测直径mm的缺陷。4台机器人并联使用,每台机器人都安装了1个大尺寸的显示器和4台200万像素的相机,每台相机在一个检测位置会拍摄8张图像。汽车面漆检测设备汽车涂料裂纹根据程度和形状,可分为针状裂纹或毛状裂纹等。山东非隧道式汽车面漆检测设备质量好价格忧的厂家
汽车面漆检测设备
随着汽车市场不断消费升级,漆面外观及质量受到越来越多的关注。工艺水平及生产环境等不确定性因素会造成涂层表面产生不同程度的缺陷。目前涂装漆膜缺陷主要依靠人工检测,劳动成本高,主观影响大,制约了涂装的生产效率。此外,靠人工不能达到完全准确的质量判断,增加子返工成木.限制了企业扩大产能,甚至还可能会造成用户抱怨,对企业声誉造成影响。近年来,随着工业信息化和智能化的发展,涂装漆面缺陷检测对自动化、智能化生产模式的需求日益增长。机器视觉作为1种新兴技术,具有高效、稳定和自动化程度高等特点,为漆面缺陷检测系统的研发奠定了理论基础。基于机器视觉的检测方法可以较好地解决传统人工检测遇到的时间长、工作量大、效率低等问题。淮南全自动汽车面漆检测设备价格无锡汽车面漆检测设备选择哪家,推荐领先光学技术(江苏)有限公司。

基于计算机视觉的表面缺陷自动检测作为一种快速发展的新型检测技术,具有速度快、效率高等优点,已经成功应用到多个行业。将其应用到汽车车身漆膜缺陷检测领域,可改变现在人工检测耗时过长、一次检出率低等缺陷,同时可以降低人工成本。主要介绍了漆膜缺陷自动检测技术的原理、特点,以及在一些生产线中的应用实例,总结了现状及存在的问题,并对其应用前景做了展望。汽车涂装是汽车生产过程中重要的一个环节,主要为汽车提供外观装饰性和长期的防腐蚀性能。常规的汽车涂装过程中,喷涂后的车身需要进行漆膜表面的缺陷检测和修饰。目前,喷涂后车身漆膜检测主要通过人工目视的方法完成,存在耗时过长、效率低下及受人为因素影响等缺点,是制约涂装车身质量的关键因素之一。随着光电、自动化和计算机图像处理技术的发展,计算机视觉在不同工业部门得到了大量的应用。比如基于计算机视觉的表面缺陷自动检测技术已经大量地应用在织物表面、食品表面、钢表面、瓷砖表面以及多晶硅太阳能电池表面检测等领域。近几年,表面缺陷自动检测技术开始在汽车车身漆膜缺陷的检测领域发展,并且已经开始在一些汽车公司测试与应用。与传统的人工检测方法相比。
传统图像算法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的参数调整过程,分类决策也需要人工构建规则引擎,每个方法和规则都是针对具体应用的.泛化能力及鲁棒性较差。具体到缺陷检测的应用场景,需要先对缺陷在包括但不限于颜色、灰度、形状、长度等的一个或多个维度上进行量化规定,再根据这些量化规定在图像上寻我符合条件的特征区域,并进行标记。传统图像处理有很多算法库,如Halcon、VisionPro和OpenCV等,一般采用编程语言调用算法库的形式来实现。常用的经典检测算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1种边缘检测算法,设定了信噪比准则定位精度准则单一边缘响应准则来提高边缘检测精度。为满足这了条准则.CANNYJ在一阶微分算子的基础上,增加了2项改进.即非极大值抑制和双阈值。非极大值抑制能控制多边缘响应和边缘定位精度;双阈值能减少边缘的漏检率。汽车面漆检测设备检测各种形成缺陷原因造成的汽车漆面涂料的多种情况检测。
所述螺纹孔内螺纹连接有与左右两个所述滑动块均固定的螺纹杆,所述转动架转动是利用所述传动腔顶壁内设置的传动装置带动所述螺纹套转动,从而带动所述螺纹杆移动,所述螺纹杆移动能够带动左右两个所述滑动块同步移动,其中左侧的所述滑动块内设置有气泵,所述气泵可以在不同时间喷出油漆或抛光液,右侧的所述滑动块底壁内设置有diyi电机,所述diyi电机输出轴末端固定设置有抛光轮,所述抛光轮高速转动同时伴随所述转动架高速转动可以实现对油漆的抛光;所述机身四个边角设置有上下贯通的滑动孔,所述滑动孔内可滑动的设置有底部末端固定有活塞的滑动杆,所述滑动杆顶部末端固定设置有限位块,所述滑动杆端壁内设置有均匀分布的锁定槽,左右两个所述滑动孔之间转动设置有diyi转轴,所述diyi转轴两侧端壁内对称设置有开口向外的花键孔,所述花键孔内可滑动的设置有末端伸入所述锁定槽内的花键杆,所述花键杆与所述花键孔端壁间设置有复位弹簧,当向下按压所述机身时,所述花键杆自上而下依次卡入所述锁定槽内,从而调整机身与所述汽车表面距离,所述机身上方设置有可转动的手动轮,将所述手动轮转动半周通过所述机身顶壁内设置的联动装置可以带动所述花键杆转动半周。南京汽车面漆检测设备选择哪家,选择领先光学技术(江苏)有限公司。浙江高精度汽车面漆检测设备哪家好
浙江汽车面漆检测设备哪家好,选择领先光学技术(江苏)有限公司。山东非隧道式汽车面漆检测设备质量好价格忧的厂家
包括四套检测机械手臂、四套漆面视觉检测模组;检测时,被检测汽车移动至检测区域后,四套检测机械手臂分别带动固定在检测机械手臂前端的四套漆面视觉检测模组依据汽车表面轮廓定位检测划分规划得到的采样点,进行汽车表面的全范围成像,成像后通过汽车漆面图像处理提取汽车漆面表面外观缺陷。所述的漆面视觉检测模组包括:n套成像镜头相机组、防护外壳、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板;n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板均刚性固定在防护外壳上;且n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板自上而下安装,多套成像镜头相机组、三个测距传感器自左而右均匀分布,大尺寸条纹投影屏设置在多套成像镜头相机组和三个测距传感器之间,均匀漫射发光板设置在三个测距传感器下端。所述的n取值为3时为比较好,三套成像镜头相机组、三个测距传感器自左而右均匀分布,且每套成像镜头相机组与每个测距传感器上下位置对称。所述的汽车表面轮廓定位检测划分规划:通过读取汽车3d模型,将模型分割为多个离散点,再依据n套成像镜头相机组的物方成像视场大小进行离散点的剔除、筛选。山东非隧道式汽车面漆检测设备质量好价格忧的厂家
上一篇: 齐齐哈尔工业质检汽车面漆检测设备质量好价格忧的厂家
下一篇: 杭州玻璃面检测设备供应商