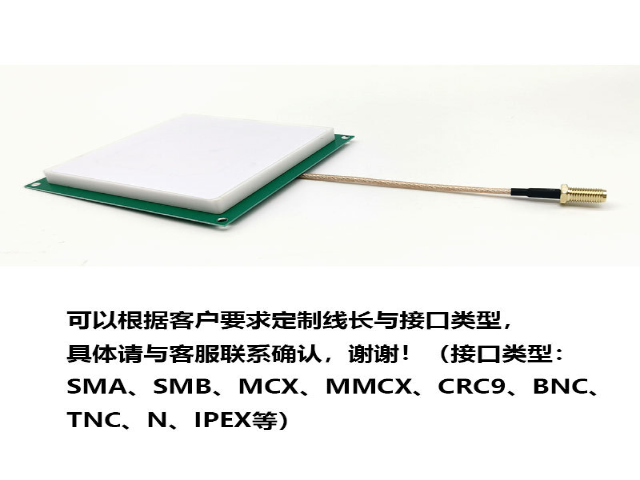
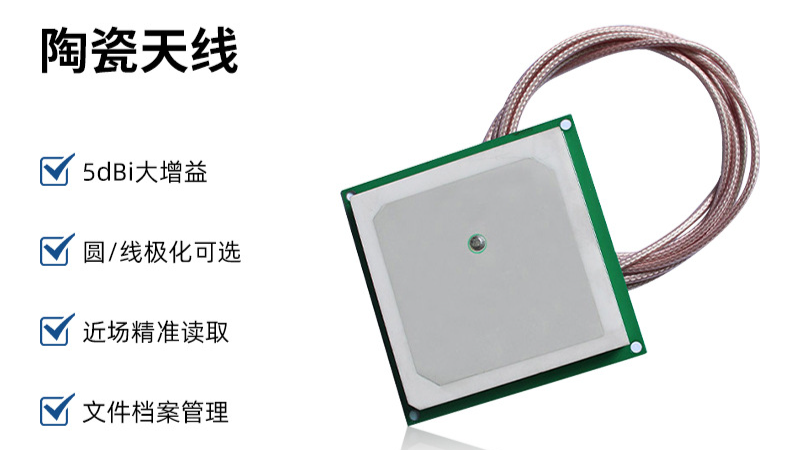
导航RFID陶瓷天线产品
从信息传递的根本原理来说,射频识别技术在低频段基于变压器耦合模型(初级与次级之间的能量传递及信号传递),在高频段基于雷达探测目的的空间耦合模型(雷达发射电磁波信号碰到目的后携带目的信息返回雷达接收机)。1948年哈里斯托克曼发表的利用反射功率的通讯莫定了射频识别射频识别技术的理论根底。射频识别技术的开展可按十年期划分如下:1940-1950年:雷达的改良和应用催生了射频识别技术,1948年定了射频识别技术的理论根底。1950-1960年:早期射频识别技术的探究阶段,主要处于实验室实验研究。1960-1970年:射频识别技术的理论得到了开展,开场了一些应用尝试。1970-1980年:射频识别技术与产品研发处于一个大开展时期,各种射频识别技术测试得到加速。出现了一些**早的射频识别应用。1980-1990年:射频识别技术及产品进入商业应用阶段,各种规模应用开场出现。1990-2000年:射频识别技术标准化咨询题日趋得到注重,射频识别产品得到***采纳,射频识别产品逐步成为人们生活中的一部分2000年后:标准化咨询题日趋为人们所注重,射频识别产品品种更加丰富,有源电子标签、无源电子标签及半无源电子标签均得到开展,电子标签本钱不断降低,规模应用行业扩大。至今。 RFID陶瓷天线可以通过无线电波与RFID标签进行通信,实现数据的读写和传输。导航RFID陶瓷天线产品
随着科技的不断发展和进步,RTK测量技术也在不断改进和完善。在未来的应用中,RTK测量将会广泛应用于城市规划、三维地图、智能交通空间定位等领域中,实现更为精确的定位和测量,更好地推动各行业的科技发展。总之,RTK测量技术是目前比较常用的高精度测量技术之一,在实际应用过程中需要注意合理选择设备、避免干扰和多路径效应等问题,以保证测量的准确性和精度。随着技术的不断发展,RTK测量将会在各行业中发挥着越来越重要的作用,推动各行业的技术和发展不断进步,为社会的发展贡献更大的力量。导航RFID陶瓷天线产品翊腾电子的RFID陶瓷天线具有高度的可靠性和安全性。

单基站RTK定位系统可以***应用于建筑工程、农业设施、地质勘探道路测量等领域。在建筑工程中,可以精确测量基础和结构物的位置,以确保**终的工程效果的质量。在农业领域中,可以通过准确测量作物的生长状态和土壤成分来优化农业生产过程。在地质勘探中,可以精确测量地质位置、岩层和地下水位等情况。在道路测量中,可以准确测量道路的坡度和弯度,从而确保在建设过程中的安全性。随着技术的不断进步,单基站RTK定位系统的应用场景越来越***该系统具有精度高、使用便捷和精确度可靠等优点,因此越来越受到***的关注和使用。在使用该系统时,需要正确安装基站、连接移动设备和基站、开始测量,并记录和分析数据。通过了解单基站RTK定位系统的使用方法。
按定位时GPS接收机所处的状态,可以将GPS定位分为静态定位和动态定位两类。利用接收机接收到的测距码或载波相位均可进行静态定位。但由于载波的波长远小于测距码的波长,若接收机对码相位及载波相位的观测精度均取至0.1周,则 C/A码及载波L所相应的距离误差分别为2.93m和1.9mm。因此,利用码相位的伪距观测量只能用于单点***定位。而载波相位观测量则是目前GPS量中精度比较高的观测量,而且它的获得不受精码(P码或Y码)保密的限制。利用载波相位进行单点定位可以达到比测距码伪距定位更高的精度。载波相位测量的**主要的应用是进行相对定位。RFID陶瓷天线可以提高供应链的可见性和效率。
点放样工程实例:
1、测前准备:获取2~3个控制点的坐标(如果没有已知数据可用静态GPS先进行控制测量),解算或用相关软件求出放样点的坐标,检查仪器是否能正常使用.
2、站的架设:将基准站架设在较空旷的地方(附近无高大建筑物或高压电线等)架设完后安装电台,连接好仪器后开启基准站主机,打开电台并设置频率。
3、建立新工程:开启移动站主机,待卫星信号稳定并达到5颗以上卫星时,先连接蓝牙,连接成功后设置相关参数:工程名称、球系名称、投影参数设置、参数设置(未启用可以不填写),***确定,工程新建完毕。
4、输入放样点:打开坐标库,在此我们可以输入编辑放样点,也可以事先编辑好放样点文件,点击打开放样点文件,软件会提示我们是对坐标库进行覆盖或是追加。
5、测量校正:测量校正有两种方法:控制点坐标求校正参数和利用点校正. 翊腾电子的RFID陶瓷天线具有抗干扰能力,适用于复杂环境。江西测试RFID陶瓷天线
RFID陶瓷天线的发展将进一步推动物联网和智能化技术的应用。导航RFID陶瓷天线产品
随着无人机、机器人等机电一体化产品的发展,精确姿态测量技术逐渐成为了研究热点。在这些机器人产品中,需要准确测量姿态,评估其运动状态和姿态信息,以提高位置控制、自主导航和避障能力。传统的基于GPS的姿态测量技术面临着精度低、受干扰强等问题。因此,基于MIMU磁传感器和双天线RTK的姿态测量方法逐渐受到人们的关注。MIMUMEMS惯性测量单元(MIMU)是一种卡尔曼滤波的惯性导航技术,是一种集成惯性导航传感器和数据处理单元于一体的产品,能够对物体的加速度、角速度、姿态等信息进行实时采集和处理。MIMU由加速度计G、陀螺仪M和磁场传感器I等多个部件组成。其中,加速度计G可以测量物体的加速度,陀螺仪M可以测量物体的角速度,而磁场传感器I可以测量物体的磁场变化,这些信息可以用来计算物体的姿态。二、双天线RTK在将MIMU用于姿态测量时,需要将其与RTK相结合,以提高定位精度。RTK全称为RealTimeKinematics(实时动态定位),是一项高精度定位技术。RTK在全球卫星定位系统(GNSS)信号的基础上,通过两个或多个接收机之间的数据交换来确定到达时问的误差,以及其他误差,比如星历和人气层误差。通过利用接收机之问的差分观测数据,可以实现毫米级别的精度。 导航RFID陶瓷天线产品
上一篇: 浙江校准四臂螺旋天线安装
下一篇: 广东工作电压四臂螺旋天线维护方法