台州智能搬运机械手
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应; 2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三坐标搬运机械手,气动抓手,PLC控制。台州智能搬运机械手
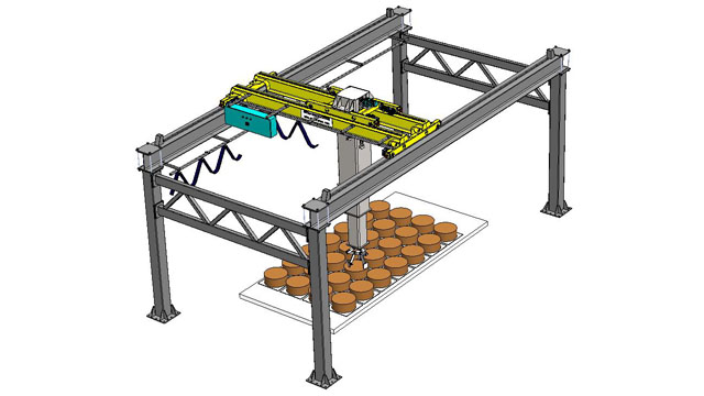
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、 产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。湖州搬运机械手报价三坐标搬运机械手生产厂家。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、 上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。
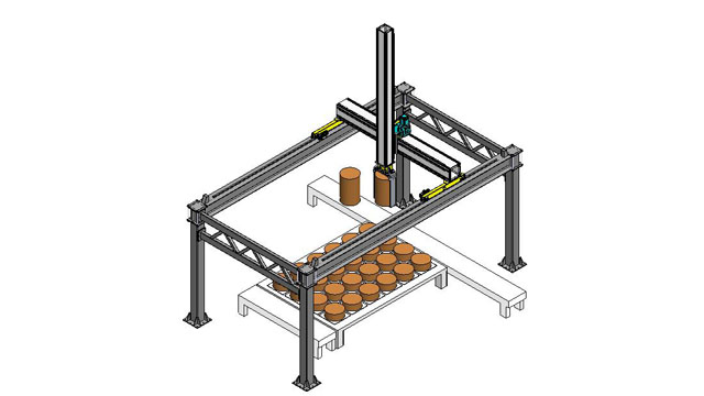
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点: 1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。三坐标搬运机械手哪家生产,南京高锐特生产。
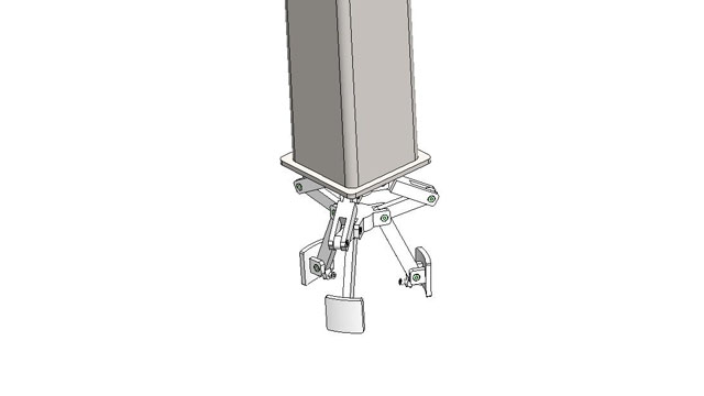
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点: 1.各轴方向以极高的速度直线运行,可用伺服电机快速响应; 2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。三坐标搬运机械手,操作方式有半自动和全自动两种。镇江电动搬运机械手
三坐标搬运机械手,PLC控制。南京高锐特起重机生产。台州智能搬运机械手
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。 三、 搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。台州智能搬运机械手
南京高锐特起重机械有限公司致力于机械及行业设备,以科技创新实现高品质管理的追求。南京高锐特起重拥有一支经验丰富、技术创新的专业研发团队,以高度的专注和执着为客户提供起重输送机械,自动起重输送,智能起重输送,电动葫芦。南京高锐特起重始终以本分踏实的精神和必胜的信念,影响并带动团队取得成功。南京高锐特起重创始人徐传本,始终关注客户,创新科技,竭诚为客户提供良好的服务。
上一篇: 攀枝花移动双梁起重机
下一篇: 静安区悬挂起重机价格