抚州道路施工防撞系统
雷达车道级主动预警技术保障生命和路产安全:在交通未封闭的公路上实施养护、清排障、应急救援和事故处置等作业的工作人员、车辆和机具,常常处在高危状态之中。即使这类作业按照交通运输部相关安全操作规程进行了精密、细致的布防,作业人员、车辆和机具也时常被各种各样的车辆意外追尾、撞击,造成严重的生命伤害和路产损失。智能雷达防撞(防闯入)车道级主动预警技术,就是专门为解决这种上路作业安全隐患而诞生的。自动驾驶技术的重中之重,是在车上安装诸多“眼睛”,尽量保证自己不撞击他人。与此相反,智能雷达防撞(防闯入)预警技术是把自己“武装”起来,隔空发力,不让本车道的危险物靠近自己,从而达到避免伤害的目的。上海智能防撞防闯入主动预警系统——江苏博崴特电子科技有限责任公司。抚州道路施工防撞系统

智能防闯入主动预警系统的优势有哪些?①告警精确度高,智能视频分析系统内置智能算法,能排除气候与环境因素的干扰,有效弥补人工监控的不足,减少视频监控系统整体的误报率和漏报率。②实时识别报警,基于智能视频分析和深度学习神经网络技术,对事故易发区域进行7*24全天候监测,当监测到人员靠近、闯入时,立即触发报警,报警信息可显示在监控客户端界面,也可将报警信息推送到移动端。③全天候运行 稳定可靠,智能视频监控系统可对监控画面进行7×24不间断的分析,有效提高了视频资源的利用率,减少人工监控的工作强度。④告警存储功能,对事故易发区域进行7*24全天候监测,当监测到人员靠近、闯入时,立即触发报警,并将报警信息存储到服务器数据库中,包括时间、地点、快照、视频等。抚州道路施工防撞系统智能防闯入预警系统:当有车辆闯入作业区,碰倒防护设备时,预警系统启动。
智能防撞(防闯入)主动预警系统默认以下智能预警模式:实时准确检测并跟踪作业现场所在车道上游300m范围的车辆,当有车辆进入作业现场所在车道末端上游200m范围且速度大于60km/h(可自行设置)或压线、S型行驶等可能威胁作业现场人员人身安全时,智能预警主机即实时向上述车辆发出有效定向声波预警,及时提醒上游车辆司机注意安全、变道行驶。如车辆变道行驶或减速至60km/h(可自行设置)以下行驶时,主机自动关闭预警定向声波。如车辆未变道且继续沿作业现场所在车道行驶并进入作业现场所在车道上游50m(可自行设置)范围且速度≧35km/h(可自行设置)时,主机即向上游车辆发出更强定向声波预警,令其变道行驶或采取制动措施,同时启动作业现场智能预警副机及智能手环预警,提醒作业人员及时避让;如车辆变道行驶或减速至35km/h(可自行设置)以下行驶时,主机自动关闭,副机和手环也同时关闭。
《车道级智能防闯入主动预警跟随车系统开发》是车道级智能防闯入主动预警跟随车系统,开创了国内外道路养排作业、交通事故处置“变被动为主动预警”新时代。
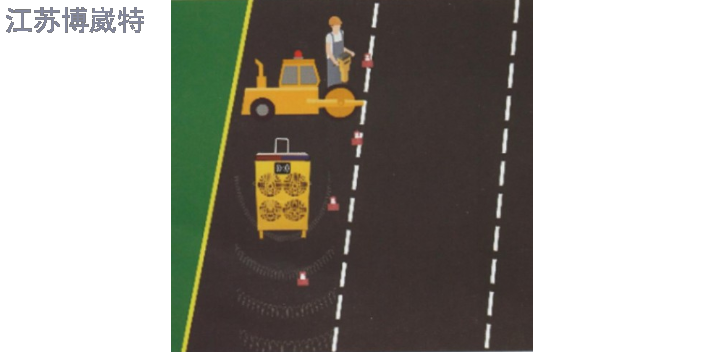
该系统集雷达探测、视频车道线检测、超声波防撞检测、LED信息显示、GPS定位、智能跟随等功能与一体。工作时,将智能跟随车主体车置于作业区警戒区中间位置,副机放置在工程车辆内。当工程车辆缓慢移动时,作业区随之前移,跟随车根据GPS定位信息,通过摄像头检测车道线,超声波防撞检测功能,无人驾驶系统控制跟随车主体在安全区域直线运动,实现作业区与警戒区的动态变化。当有危险车辆进入警戒区200米范围内,系统通过雷达探测,向上游车辆发出声音警报。 贵州智能防撞防闯入主动预警系统——江苏博崴特电子科技有限责任公司。

“路宁宝”技术指标:1、雷达发射频率:≧24GH;2、监测距离:0.2-200m3、距离精度:±0.1m4、车道检测范围:2-50m;5、报警车速:0-200km/h;6、近报警距离10-300m;7、近报警车速0-200km/h;8、定向声波扬声器额定功率≦50W/个;9、灵敏度≧90db/W/m;10、定向声波传送距离:0-200m;11、主、副机、手环通讯距离:0-200m。智能防撞防闯入主动预警系统(路宁宝)的诞生,开创了国内外道路养排作业、事故处置变“被动防护为主动预警”新时代。其技术不但可用于交通作业场防闯入以及预防追尾作业车辆,而且可应用于电力施工、水利航道等领域的安全预警防护,及至拓展至商用车领域的“二客一危车辆”和乘用车领域的智能“三角架”等。“路宁宝”创新要点:实时、提前、有效预警。抚州道路施工防撞系统
太原智能防撞防闯入主动预警系统——江苏博崴特电子科技有限责任公司。抚州道路施工防撞系统
道路交通安全是指在交通活动过程中,能将人身伤亡或财产损失控制在可接受水平的状态。交通安全意味着人或物遭受损失的可能性是可以接受的;若这种可能性超过了可接受的水平,即为不安全。道路交通系统作为动态的开放系统,其安全既受系统内部因素的制约,又受系统外部环境的干扰,并与人、车辆及道路环境等因素密切相关。系统内任何因素的不可靠、不平衡、不稳定,都可能导致矛盾,产生不安全因素或不安全状态。道路交通安全:①交通安全是在一定危险条件下的状态,并非没有交通事故的发生。②交通安全不是瞬间的结果,而是对交通系统在某一时期、某一阶段过程或状态的描述。③交通安全是相对的,没有危险的交通安全是不存在的。④对于不同的时期和地域,可接受的损失水平是不同的,因而衡量交通系统是否安全的标准也不同。抚州道路施工防撞系统
上一篇: 南充商用车防撞系统
下一篇: 河源道路施工防撞系统