绍兴垂直升降式智能停车设备
自锁连杆40的长度方向同时垂直于输出杆21的长度方向与防坠挂钩30的长度方向;在自锁连杆40处于可移动位40b时,防坠挂钩30分离于防坠座50。在使用时,将安装底座10安装在升降轿厢200,将防坠座50安装在平层处即可,安装方便。控制电机20的输出杆21、自锁连杆40、防坠挂钩30依次枢接,防坠挂钩30铰接于安装底座10。采用控制电机20驱动输出杆21移动,自锁连杆40与防坠挂钩30联动,自锁连杆40在自锁位40a与可移动位40b之间切换,相应地,防坠挂钩30挂设或分离于防坠座50,实现防坠挂钩30的高精度控制。当升降轿厢200到达目的层时,使防坠挂钩30挂设在防坠座50,实现平层。同时自锁连杆40处于机械自锁位40a,即使此时断电或是出现其它故障情况,防坠挂钩30保持挂设在防坠座50,实现防坠功能,保证升降轿厢200安全。当升降轿厢200准备移动至其它位置时,可以在不微升的情况下,使防坠挂钩30分离于防坠座50,减少设备运作,节省时间并减少故障点,安全可靠、经济又节能。具体地,在控制电机20驱动输出杆21移动并使自锁连杆40处于自锁位40a时,自锁连杆40的长度方向同时垂直于输出杆21的长度方向与防坠挂钩30的长度方向,即使断电或防坠挂钩30受到外力作用。同时汽车停放会存在靠边的情况,容易造成汽车后视镜超出安全停放位置的现象。绍兴垂直升降式智能停车设备

本实施例的检测装置不会受到光线等环境因素的影响,机械式的检测方法来检测位置变化更加准确,本实施例的后吊点防松检测装置6中设有讯号模块,向plc输出限位撞针60的角度变化讯息,限位撞针60先是抵紧在连接后吊点的钢丝绳上,只要后吊点的钢丝绳一直保持张紧状态,限位撞针60的抵紧状态不会改变,不会触发检测信号,扭簧62为限位撞针60提供复位的趋势力,钢丝绳一旦松弛,抵紧限位撞针60的力不在存在,限位撞针60在扭簧62的作用力下复位,角度发生变化,即触发了检测信号,及时控制升降传动机构3停止。实施例3本实施例的松动自检立体停车设备,在实施例2的基础上做进一步改进,所述角度a为60°~90°。在该角度范围内,后吊点防松检测装置6的检测为灵敏。实施例4如图5和图6所示,本实施例的松动自检立体停车设备,在实施例1~3的基础上做进一步改进,所述的前吊点防松检测装置7包括支座一70、摆臂71、滚轮72、支座二73和限位开关74;所述支座一70和支座二73相邻设置在移动框架2顶面;所述摆臂71一端和支座一70铰接,另一端转动式连接有滚轮72;所述滚轮72置于连接前吊点的钢丝绳上;所述限位开关74固定连接在支座二73上,所述限位开关74的触发端位于摆臂71下落的路径上。绍兴垂直升降式智能停车设备白天医院、学校周边停车位严重不足,而周边住宅小区泊位闲置等。
显然,所描述的实施例只是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。请参阅图1-5,本实用新型提出了一种单侧立柱简易停车设备,包括立柱2、滑台1、上车台3、油缸4、锁紧装置、链条5和保护装置6,立柱2由底板21和支撑柱22组成,底板21呈矩形体,底板21的四角通过膨胀螺丝固定在地面,底板21的左右两侧分别与一个支撑柱22固定连接,支撑柱22通过膨胀螺丝固定在墙面,通过膨胀螺丝将立柱2固定在墙面和地面,利用地面和墙面的强度来增加设备的稳定性,使设备能承载极高的重量。两个支撑柱22对应的一面分别固定连接有导轨7,滑台1左右两侧的顶端和底端分别活动连接有导向轮8,四个导向轮8分别与两个导轨7活动连接,导向轮8在滑台1上有着进行转动的功能,滑台1通过导向轮8在两个支撑柱22之间有着上下滑动的功能,导轨7对导向轮8进行限位,使滑动的运转更为稳定,滑台1的两侧固定连接有连接板9,两个连接板9分别与两个支撑柱22远离的一面贴合。链条5与滑台1固定连接,链条5远离滑台1的一端与底板21固定连接。
保护装置6由装置箱61、推动杆62、链条筒63、主齿轮64、副齿轮65、齿轮板69、导向板66、滚轮67和推动板68组成,装置箱61开设有矩形槽10,装置箱61固定连接在左侧支撑柱22的远离滑台1的一面,且支撑柱22的连接板9位于矩形槽10内,矩形槽10左右两侧的内壁分别与一个链条筒63固定连接,两个链条筒63对应的一面开设有推动孔11,矩形槽10内壁的顶端和底端分别活动连接有一个主齿轮64,两个主齿轮64均与一个链条5的内圈啮合,链条5的两侧分别位于两个链条筒63内,位于矩形槽10内的连接板9与推动杆62固定连接,推动杆62穿过推动孔11与链条5内圈固定连接,位于底端的主齿轮64与副齿轮65固定连接,装置箱61的底面开设有板孔12,板孔12与副齿轮65对应,齿轮板69位于板孔12内,齿轮板69与副齿轮65对应的一面开设有齿轮槽13,齿轮槽13从齿轮板69的左端开设有齿轮板69的右端,齿轮板69与副齿轮65啮合,底板21对应滑台1的一面与导向板66固定连接,齿轮板69对应导向板66的一端与推动板68固定连接,推动板68对应导向板66一面的两端分别与一个滚轮67活动连接,推动板68的顶端向支撑柱22的方向倾斜30度,滑台1提升时连接板9随着滑台1进行提升,连接板9带动推动杆62对链条5进行推动。所以时候它在使用的时候也主要是针对流水线作业或者是一些比较大批量包装而设计的全自动立体停车设备。

防坠挂钩30还是保持挂设在防坠座50,实现平层与防坠功能。只有在控制电机20驱动输出杆21移动并使自锁连杆40切换至可移动位40b时,自锁连杆40才能移动,并让防坠挂钩30分离于防坠座50,实现升降轿厢200的移动。在本实用新型另一实施例中,控制电机20安装于安装底座10。在装配时,直接把安装底座10安装于升降轿厢200即可,容易装配。在本实用新型另一实施例中,控制电机20可以为步进电机或其它控制电机20,便于准确控制输出杆21的位移。具体地,在控制电机20为直线步进电机时,输出杆21输出直线位移。采用步进电机后,通过脉冲信号对步进电机精细控制,从而实现对行程的精确控制,让自锁连杆40在自锁位40a与可移动位40b之间可靠切换。在本实用新型另一实施例中,输出杆21与自锁连杆40之间通过一销轴61枢接;自锁连杆40与防坠挂钩30之间通过第二销轴62枢接。采用销轴穿过两个结构件,实现两个结构件枢接与力的传递。在控制电机20输出杆21移动时,自锁连杆40与防坠挂钩30跟随移动,使防坠挂钩30打开和关闭,保证开闭运作的可靠性,实现了对防坠挂钩30打开与关闭动作的高精度控制。在本实用新型另一实施例中,安装底座10连接有固定板70,防坠挂钩30枢接于固定板70。停车场建设滞后,而停车需求大量产生。绍兴垂直升降式智能停车设备
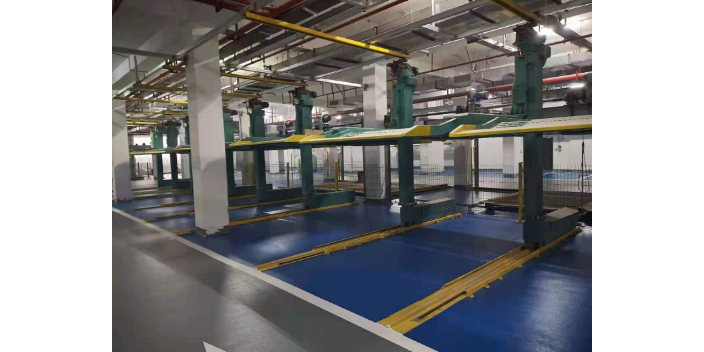
简易升降式机械停车位有垂直升降式和俯仰升降式两种类型。绍兴垂直升降式智能停车设备
记者了解到,机械车位属于特种设备,根据现行的《车库建筑设计规范》,机械车位根据车型的不同,总共有6种不同的尺寸。其中,限长为4.4米至5.6米不等,限宽为1.75米至2.05米,限高为1.45米至2.05米。也就是说,机械车位并非只有单一设计标准,可供选择的空间比较大。即便是停放大型车,也是够用的,不存在标准过时一说。北京市特种设备行业协会的工作人员表示,建设机械车位不能盲目,在这之前,一定要充分考虑到其适用性,有关各方应通过对居民的调研,综合考虑尺寸、承重等问题。这其中,确定机械车位的尺寸是重要的一环,可以根据车型数量以及居民的需求,选择合适的尺寸,并且严格按照相对应的标准进行设计施工。当然,机械车位的设计,要满足大多数人的需求,目前,很多小区都选择常规标准的尺寸,如果机械车位全部选择大的尺寸,有可能造成空间资源的浪费。绍兴垂直升降式智能停车设备
上一篇: 绍兴多层垂直升降立体智能车库常见问题
下一篇: 常州升降横移智能车库常见问题