海南室外巡检机器人定制
硬件架构机器人的硬件将主要由中枢控制器、四轮全向机器人平台、垂直升降构成。其中中枢控制器主要负责数据信息的采集和处理,对机器人的运动姿态予以实时监控及控制。同时将机器人的传感器数据信息、运动状态信息等传输至中控机,并对相应的控制指令予以响应;四轮全向机器人平台是机器人的承载平台,将借助4个麦克纳姆轮实现驱动;垂直升降云台在控制器以及直流无刷电机的驱动及控制下,主要负责对机器人的多度检测:传感器系统主要包括激光雷达、超宽带定位模块等传感器而构成,通过多种传感器的协同配合,共同完成对机器人相关情况的判断。轨道巡检机器人,就选上海洲和智能科技有限公司,欢迎客户来电!海南室外巡检机器人定制

激光液位传感器:激光液位传感器利用激光测距原理来测量液位。巡检机器人可以装载激光发射器和接收器,向储罐内部发射激光并接收反射回来的激光。通过测量激光的传播时间和反射角度,可以计算出液位高度。重力液位传感器:重力液位传感器利用重力的原理来测量液位。巡检机器人可以装载重力传感器,通过测量储罐底部和顶部之间的重力差来计算液位高度。总的来说,巡检机器人可以通过不同类型的传感器来监测石油储罐的液位,从而保障石油化工行业的安全生产和运营。不同类型的传感器具有不同的优点和适用范围,因此在选择传感器时需要根据具体情况进行选择和配置。天津园区巡检机器人定制上海洲和智能科技有限公司轨道巡检机器人值得放心。

通信接口:通过总线通信方式主要借助分立的控制器(Controller)来实现对中枢控制器连接的架构,各类传感器(Sensor)也是通过这样一种方式从而挂载于通信端口上。而中枢控制器将主要负责对各类数据的采集,并遵循设定的格式对这些数据加以打包传输。而上位机在收到相关指令信息后也会先将数据解析出来然后加以执行。系统电源:主要是指两个部分,即中控机电源以及机器人平台电源。其中针对工控机电源将使用单独的锂电池(12V.40Ah)。考虑到该电池存在电压输出不够稳定,将对其借助DC·DC予以升压处理。平台电源能借助平台实现电压的稳定输出,能满足多个供电需求。
智能巡检机器人实现自主导航的方式如下:基于SLAMTEC自主定位导航套装,由高性能激光雷达RPLIDAR与定位导航控制SLAMWARE构成,机器人可以实现自主定位、自动建图、路径规划与自动避障。通过内置激光探头对周围环境进行360度扫描,并获得周边环境的轮廓信息。将环境轮廓信息与之前已经建立的信息图进行匹配,从而使机器人实现准确的定位导航。构建周围环境的地图,精确定位自己在地图中的位置。然后根据地图进行路径规划控制自己完成移动。在移动的过程中,机器人还需要根据现场环境的动态变化,实时躲避障碍物直至到达终目标点。上海洲和智能科技有限公司为您提供AI巡检机器人,期待您的光临!
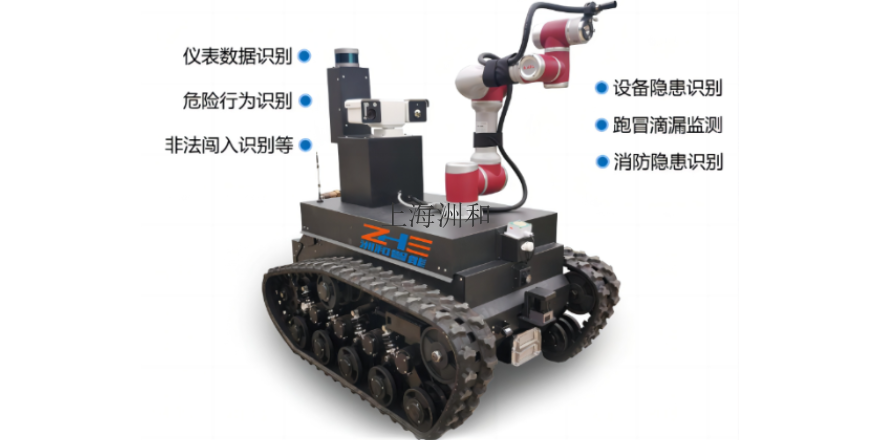
功能与特点图像识别功能石化领域的巡检目标主要包括压力表、温度表、流量计、球阀、截止阀和蝶阀等等,经过预先标定,将每处需要拍照检测的目标观测点设置为云台的预置点,机器人通过导航及RFID定位运行到检测位后,自动调用云台进行拍照,然后将目标图像传送到远程工作站进行识别。可识别的信息包括:阀门开度、仪表指针读数、阀门有无泄露等。声音采集功能实时采集巡检区域内环境和设备的声音,如发现较明显的声音异常,则发出预警信号,从而达到及时发现故障、避免故障扩大的目的。智能机器巡检机器人,就选上海洲和智能科技有限公司,让您满意,欢迎您的来电哦!河北自主研发巡检机器人公司
上海洲和智能科技有限公司致力于提供煤矿巡检机器人,期待您的光临!海南室外巡检机器人定制
在民用领域,巡检机器人方案通常针对不同场景和需求进行设计和应用,与防爆巡检机器人方案相比,具有一些不同的特点。首先,民用巡检机器人方案的应用场景更加广和多样化,包括但不限于建筑巡检、管道巡检、仓储管理、密闭空间测绘、隧道巡查、桥梁运维检测等。不同场景的巡检要求和难度也有所不同,需要根据具体需求进行定制化的设计和应用。其次,民用巡检机器人方案的操作和维护更加简单和便捷。由于民用场景的巡检要求相对较低,对机器人的精度和稳定性要求也相应较低。因此,在方案设计和制造过程中,会更加注重机器人的易用性和维护性,以便更方便地进行操作和维护。另外,民用巡检机器人方案的成本相对较低,更容易被广大企业和个人接受和使用。与防爆巡检机器人相比,民用巡检机器人的制造成本和销售价格更加亲民,能够更好地满足市场需求。海南室外巡检机器人定制
上一篇: 广西轨道巡检机器人工程
下一篇: 吉林室外巡检机器人厂家报价