北京Panasonic伺服驱动器MBDLN21NE使用
控制方式
松下伺服驱动器一般可以采用位置、速度和力矩三种控制方式,主要应用于高精度的定位系统,目前是传动技术的**。松下伺服驱动器按照其控制对象由外到内分为位置环、速度环和电流环,相应伺服驱动器也就可以工作在位置控制模式、速度控制模式和力矩控制模式。当松下伺服驱动器工作在力矩控制模式时,其力矩给定值可以由三种方式给定:1、使用模拟量给定;2、参数设置的内部给定;3、通讯给定。当松下伺服驱动器工作在速度控制模式时,其速度给定值可以由三种方式给定:1、使用模拟量给定;2、参数设置的内部给定;3、通讯给定。当松下伺服驱动器工作在位置控制模式时,其位置给定值可以由三种方式给定:1、脉冲输入给定;2、参数设置的内部给定;3、通讯给定。参数设置的内部给定应用比较少,为有限的有级调节。使用模拟量给定的优点是响应快,应用于许多高精度高响应的场合,缺点是存在零漂,给调试带来困难。 脉冲控制兼容常用信号方式:CW/CCW(正反向脉冲)、脉冲/方向、A/B相信号。缺点是响应慢,日系和国产多采用这种方式。通讯给定常为总线通讯方式,也有点对点通讯方式和网络通讯方式。 使较大惯量的负载停止时或上下轴驱动时,通过再生电阻消耗由伺服电机返回给伺服驱动器能量的功能。北京Panasonic伺服驱动器MBDLN21NE使用

工作原理
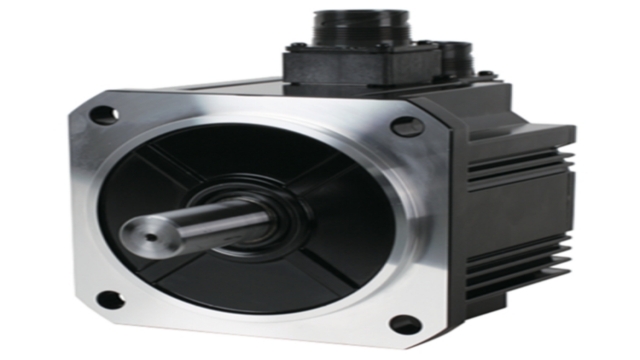
伺服驱动器(图1)主流的伺服驱动器均采用数字信号处理器(DSP)作为控制**,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为**设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。
北京Panasonic伺服驱动器MBDLN21NE使用● 高速运转时动态制动器动作的情况下,请设定10分钟左右的停止时间。
松下伺服驱动器
AC伺服电机·驱动器MINASA6N系列是对应100Mbps全双工超高速运动网络RealtimeExpress(RTEX),满足要求高速、高精度、高性能化先进网络伺服。MINASA6N系列是用RTEX对应的上位控制器和在市场上公开销售LAN电缆(CAT5e以上的STP)做连接,可对应比较大轴数为32轴(通信周期为0.5ms以上情况)。特别是对于轴数较多的机器实现了大幅度节省配线和降低系统成本。由于RTEX的比较大节点间电缆长度为100m,适用于大型系统的同时,凭借轴间同期性的优点,可适用于高精度的CP(ContinuousPath)控制。为了对应各种需求,MINASA6N系列可对应位置、速度、转矩全控制模式,通信周期**快为0.0625ms(与以前相比减小了25%),比较大脉冲频率为4Gpps(是以往的10倍)。对原来的MINASA5N系列进行了飞跃性的性能升级。*2),产品阵容扩展到输出功率为50W~22kW的电机。通过采用23位绝对式编码器,实现了更高分辨率,更高精度定位的机械驱动。同时,搭载了在A5Ⅱ系列中广受好评的2自由度控制,使得调试设定更加简单。MINASA6N系列具备了各种自动设定项目的实时自动调整等功能,简单地进行多种功能的调整。可使低刚性机器具备比以往更高的稳定性、使高刚性机器具备更高的运转速度和精度。
松下伺服的特点:
一,带操作面板,控制和使用简便易行每套松下伺服驱动器上都配有操作面板,各种参数和控制方式均可通过操作面板实行调整,非常适合于现场调试。面板可显示运行速度、位置脉冲、实际转矩、接线I/O状态、参数设定、错误原因等大量信息。特别是实际转矩的显示给设计、选型提供了极大方便。通过操作面板可以检查接线状态,用户可利用此功能判别接线错误,十分有效。
二,稳妥方便的自动调整,刚性调整更方便用户在调试设备时可以启动自动增益调整功能来调节伺服系统的刚性。松下伺服在自动增益调整时运动范围小(电机正转两圈反转两圈)运动速度低(约100rpm),所以在磨床等运动行程非常有限的场合运用时非常安全可靠。 一旦发生错误,便立即停机,并告以报警故障原因,在用户解除故障后方可重新工作,因此可靠性极高。

伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置三闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起到关键作用 [1]。在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度环的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/T测速法。M/T测速法虽然具有一定的测量精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括:1)测速周期内必须检测到至少一个完整的码盘脉冲,限制了比较低可测转速;2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法保证测速精度。因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能。AC 伺服电机·驱动器 MINAS A6 系列是可满足追求高速度、高精度及需进行简单设定的机器所有要求的伺服。北京Panasonic伺服驱动器MBDLN25SG销售厂家
接通电源时,为防止由于突入电流引起的电源配线用开关误动作,内置了突入电流抑制电阻。北京Panasonic伺服驱动器MBDLN21NE使用
3采用有执行电机而没有负载的测试平台这种测试系统由两部分组成,分别是被测伺服驱动器—电动机系统和上位机。上位机将速度指令信号发送给伺服驱动器,伺服驱动器按照指令开始运行。在运行过程中,上位机和数据采集电路采集伺服系统的运行数据,并对数据进行保存、分析与显示。由于这种测试系统中电机不带负载,所以与前面两种测试系统相比,该系统体积相对减小,而且系统的测量和控制电路也比较简单,但是这也使得该系统不能模拟伺服驱动器的实际运行情况。通常情况下,此类测试系统*用于被测系统在空载情况下的转速和角位移的测试,而不能对伺服驱动器进行***而准确的测试。北京Panasonic伺服驱动器MBDLN21NE使用