湖南无杆电缸
在电子装配过程中,电缸可以在多个环节实现自动化,以下是其中一些常见的应用环节:螺丝锁付:电缸可以与自动螺丝机配合使用,实现螺丝的自动供给、定位和锁紧。通过电缸的精确控制,可以确保螺丝的拧紧力矩和位置准确,提高装配质量和效率。插件插入:在电子产品的装配中,经常需要将各种插件插入到电路板或连接器中。电缸可以与夹具或插件机配合使用,实现插件的自动插入和定位,减少人工操作,提高生产效率和一致性。焊接:电缸可以用于自动焊接设备中,控制焊接头的运动和位置,实现焊接过程的自动化。通过电缸的精确控制,可以确保焊接质量和稳定性,提高生产效率。测试:在电子装配过程中,需要进行各种测试来确保产品的质量。电缸可以与测试设备配合使用,驱动测试夹具或传感器进行精确的测试操作,实现测试的自动化和准确性。这些应用环节中的自动化可以提高生产效率、降低劳动成本,并减少人为因素对产品质量的影响。电缸的高精度、高速度和高可靠性使其成为电子装配自动化中重要的驱动元件。请注意,具体的自动化应用还会受到产品类型、生产规模和工艺要求等因素的影响,因此在实际应用中需要根据具体情况进行定制和优化。 电缸的推力输出平稳,减少了机械冲击。湖南无杆电缸
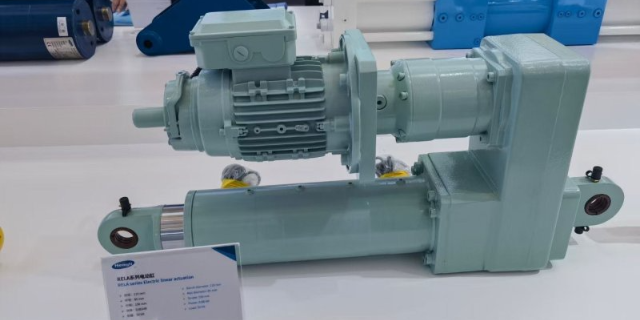
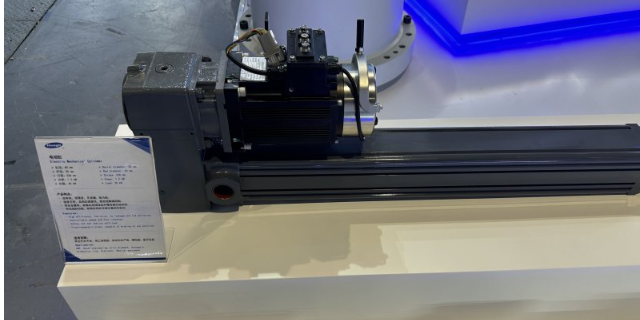
电缸
电缸在制造业中有许多其他应用场景,以下是其中一些:医疗设备制造:在医疗设备制造领域,电缸被应用于手术床、手术台等医疗设备的运动控制。例如,在放射设备中,电缸用于精确控制照射位置和角度,保证准确性和安全性。半导体制造:在半导体制造中,电缸用于各种半导体设备的运动控制,如晶片加工、封装测试等。由于电缸具有高精度和高速度的特性,能够实现快速、稳定、准确的运动控制,从而提高生产效率和产品质量。航空航天制造:在航空航天制造领域,由于对设备的精度和可靠性要求极高,电缸得到了应用。例如,在飞机制造中,电缸用于控制机翼、尾翼等部件的精确装配和调整;在航天器制造中,电缸用于控制卫星的展开、调整和定位等。智能装备制造:智能装备制造领域涉及各种自动化和智能化设备,电缸作为运动控制的重要组成部分,被应用于智能机器人、智能物流装备、智能仓储设备等。通过精确控制电缸的运动轨迹和速度,可以实现高效、准确的自动化生产。综上所述,电缸在制造业的应用场景非常广包括精密加工、自动化生产线、物料输送、轴承电缸、医疗设备制造、半导体制造、航空航天制造以及智能装备制造等。这些应用场景表明。 江苏电缸脉冲电缸的轻量化设计使其适用于移动设备。
伺服电缸的发展趋势主要体现在以下几个方面:高精度:随着工业自动化和智能制造的发展,对伺服电缸的精度要求越来越高。未来,伺服电缸将通过改进制造工艺、提高零部件加工精度、优化控制系统等方式,进一步提高其定位精度和重复定位精度,以满足高精度设备的需求。高速率:在某些需要高速运动的场合,伺服电缸需要具备更高的响应速度和更高的动态性能。未来,伺服电缸将通过优化设计、减轻重量、减小转动惯量等方式,进一步提高其响应速度和动态性能,以满足高速运动控制的需求。大负载:随着工业自动化和智能制造的发展,伺服电缸需要承载更大的负载。未来,伺服电缸将通过采用新材料、优化结构设计、提高承载能力等方式,进一步提高其承载能力,以满足大负载设备的需求。模块化与智能化:伺服电缸将实现模块化和智能化,使其能够适应更多的应用场景和更复杂的控制要求。例如,伺服电缸可以通过集成传感器和执行器,实现自感知、自适应、自调整等功能,提高其智能化水平和适应性。节能环保:随着环保意识的提高,伺服电缸将更加注重节能环保。未来,伺服电缸将通过采用高效电机、优化减速机构、降低摩擦和振动等方式,进一步降低能耗和减少噪音,以满足节能环保的要求。
Modbus协议是一种串行通信协议,用于工业自动化系统中连接电子设备,如PLC、传感器、执行器等。它定义了主从设备之间的通信方式,主设备发送请求,从设备响应。以下是Modbus协议的特点:简单易用:Modbus协议定义了明确的数据传输格式和命令集,易于学习和实现。可靠性高:Modbus协议采用了可靠的通信机制,如错误校验和重传机制,确保数据传输的准确性和稳定性。支持多种传输介质:Modbus协议支持多种传输介质,如串口、以太网、无线等,可以根据实际需求进行选择。应用:Modbus协议被应用于各种工业自动化领域,如电力、水处理、化工等,具有多样的设备兼容性和技术支持。可扩展性:Modbus协议支持多种从设备类型和数据格式,可以根据实际需求进行扩展和定制。安全性:Modbus协议支持加密和认证功能,可以保证数据传输的安全性。成本低廉:由于Modbus协议被使用和支持,相关的硬件和软件成本相对较低。总之,Modbus协议是一种简单易用、可靠性高、应用广、可扩展、安全且成本低廉的串行通信协议,适用于工业自动化系统中的设备间通信和控制。 电缸的运行状态可以通过指示灯或显示屏进行监控。
电缸与上位机之间的调试主要涉及电缸与上位机之间的通信和控制。以下是一些常见的调试方法:确定通信协议:首先需要确定电缸与上位机之间的通信协议,包括通信端口、波特率、数据位、停止位、校验位等参数。确保协议的一致性和正确性是调试的基础。编写通信程序:在上位机上编写通信程序,使用相应的编程语言和库函数进行电缸的通信和控制。程序应该具备发送控制指令、接收电缸状态信息、实现实时控制等功能。测试通信功能:通过发送测试指令来测试电缸与上位机之间的通信功能,确保能够正确地发送控制指令和接收电缸状态信息。调整电缸参数:根据实际需求,在上位机上调整电缸的参数,如速度、加速度、位置等,以实现精确控制。监控和记录:通过上位机程序实时监控电缸的运动状态和位置,并记录相关数据。这对于后续的分析和故障排查非常重要。故障排查:当电缸运动出现异常时,可以通过上位机程序进行故障排查,检查通信协议、控制指令、电缸参数等方面是否存在问题。安全措施:在调试过程中,需要注意安全措施,确保调试过程中不会对设备和人员造成伤害。例如,在调试前进行安全检查、设置安全区域、佩戴防护装备等。 电缸助力汽车生产线上的各种装配任务。FESTO电缸定义
电缸的防护设计考虑了防尘和防水功能。湖南无杆电缸
电缸的精度实现涉及到多个方面,包括机械设计、控制系统、驱动器、传感器等。以下是一些实现电缸高精度的关键因素:机械设计:电缸的机械设计是实现高精度的关键。在设计中,需要考虑到导轨、轴承、丝杠等部件的精度和刚度,以及各部件之间的装配精度。同时,需要合理设计电缸的结构,以减小热变形和振动对精度的影响。控制系统:控制系统是实现电缸高精度的要点。控制系统需要能够精确控制电机的运动,包括速度、位置和推力等。同时,控制系统还需要能够实时处理传感器反馈的数据,对电缸的位置和速度进行实时调整,以保证高精度运行。驱动器:驱动器是实现电缸高精度的关键部件。选择高精度的伺服驱动器和控制器是保证电缸高精度运行的关键。伺服驱动器和控制器能够精确控制电机的运动,从而实现高精度的位置和速度控制。传感器:传感器是实现电缸高精度的重要部件。传感器能够实时监测电缸的位置和速度,并将数据反馈给控制系统。选择高精度的传感器和编码器是保证电缸高精度运行的重要措施。装配和调试:装配和调试也是实现电缸高精度的重要环节。在装配过程中,需要保证各部件之间的装配精度,以减小误差。在调试过程中,需要对电缸的运动参数进行精确调整。 湖南无杆电缸