杭州船舶抗倾倒阀门遥控系统
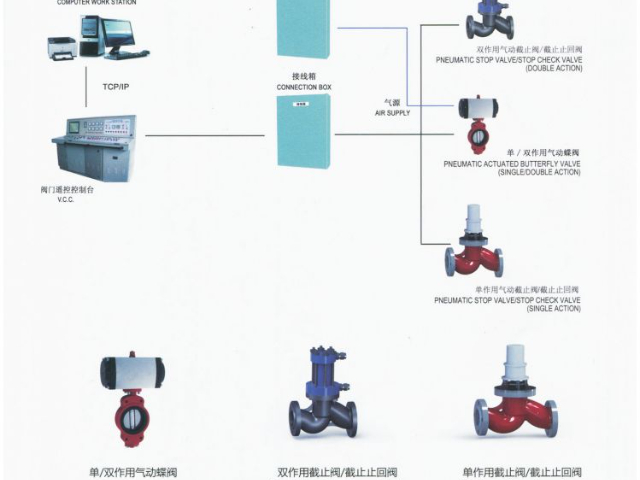
电液式阀门遥控系统的工作原理
当操作人员在操作界面发出阀门控制指令(如开启或关闭阀门、调整阀门开度)时,电气控制单元接收指令并进行处理。处理后的控制信号通过信号传输模块发送到液压控制单元。液压控制单元根据接收到的信号,通过控制液压油的流向和流量来驱动液压执行机构。例如,如果是开启阀门的指令,液压控制单元会使液压油进入液压执行机构的相应腔室,推动活塞(对于液压缸)或使液压马达旋转,从而带动阀门开启。在阀门动作过程中,传感器单元实时采集阀门的开度、液压系统的压力和流量等参数,并将这些数据反馈给电气控制单元。电气控制单元根据反馈信息,调整控制信号,以实现对阀门的精确控制。 无锡宏智铭科技是一家专业提供阀门遥控系统服务的公司,欢迎新老客户来电!杭州船舶抗倾倒阀门遥控系统
电动式阀门遥控系统在船舶领域的应用,货油输送系统方面:
装卸货油:在油轮或运输化学品等液体货物的船舶上,货油的装卸需要高度精确的控制。电动式阀门遥控系统可以准确控制货油管道上的阀门,实现货油的安全、高效装卸。船员可以根据装卸进度和货油舱的液位情况,远程操作阀门的开度,调节货油的流量和流速,避免货油泄漏、溢出等事故的发生8。货油舱隔离:在船舶运输不同种类的货油或进行货油舱的清洗、维修等作业时,需要将不同的货油舱进行隔离。电动式阀门遥控系统可以可靠地关闭和开启隔离阀门,确保各货油舱之间的单独性,防止货油的混合和交叉污染。 连云港阀门遥控系统报价无锡宏智铭科技致力于提供定制各类阀门遥控系统服务,欢迎您的来电!
电动式阀门遥控系统的工作原理
当控制单元接收到阀门操作指令后,会向驱动单元发送控制信号。驱动单元中的电机根据信号启动,通过减速机将动力传递给阀门执行机构。在阀门动作过程中,反馈单元实时采集阀门的开度和状态信息,并将这些信息反馈给控制单元。控制单元根据反馈信息,利用控制算法(如比例 - 积分 - 微分算法,PID)对电机的转速和转向进行调整,以实现对阀门开度的精确控制。例如,当阀门需要开启到 50% 开度时,控制单元根据位置传感器反馈的信息,不断调整电机的运行,直到阀门达到目标开度。
电动式阀门遥控系统的系统构成
控制单元:电动式阀门遥控系统的控制单元是重要部分,通常由可编程逻辑控制器(PLC)或微控制器(MCU)构成。PLC 具有强大的逻辑控制功能和丰富的输入 / 输出接口,能够方便地处理各种复杂的控制指令。MCU 则更加灵活,可根据具体需求进行定制化编程。控制单元接收来自操作终端(如控制台或上位机软件)的指令,这些指令可以是手动输入的阀门开启、关闭或开度调节命令,也可以是来自自动化程序的预设指令。驱动单元:主要由电机和减速机组成。电机是动力源,根据阀门的大小、所需扭矩等因素选择合适的电机类型,如直流电机、交流异步电机或步进电机。直流电机控制简单,调速性能好;交流异步电机可靠性高、功率范围广;步进电机则能实现精确的角度控制。减速机用于降低电机的转速并增大扭矩,使电机输出的动力能够满足阀门操作的要求。
阀门执行机构:对于不同类型的阀门,执行机构有所不同。
反馈单元:包括位置传感器和状态传感器。位置传感器用于精确测量阀门的开度,常见的有电位计式、编码器式等。 阀门遥控系统品质可靠,欢迎咨询无锡宏智铭科技了解!

船舶抗倾控制系统是保障船舶在各种工况下(如装卸货物、遭遇风浪等)保持平衡和稳定,防止船舶过度倾斜而设计的一套重要系统。
系统组成部分
传感器倾斜传感器:这是系统的关键部件之一。它通常安装在船舶的关键位置,能够精确测量船舶的横倾和纵倾角度。其工作原理基于重力原理或加速度原理,比如采用陀螺仪或加速度计。当船舶发生倾斜时,传感器能够实时感知倾斜的方向和角度大小,并将这些数据发送给控制单元。液位传感器:在船舶的各个液舱(如燃油舱、淡水舱等)中安装液位传感器。因为液舱内液体的晃荡和分布变化会对船舶的稳性产生影响。液位传感器可以监测液舱内液体的高度、体积和重心位置的变化,为船舶的稳性计算提供重要的数据。控制单元控制单元是船舶抗倾控制系统的“大脑”。它接收来自传感器的各种数据,包括船舶的倾斜角度、液舱液位等信息。然后,根据预设的算法和船舶的稳性标准进行计算和分析。例如,它会根据船舶的当前状态判断船舶是否处于安全的倾斜范围,如果超出安全范围,控制单元会发出指令来启动相应的抗倾设备。
抗倾设备:压载水系统、可移动重物系统 阀门遥控系统服务,就选无锡宏智铭科技,让您满意,欢迎新老客户来电!烟台气动式阀门遥控系统
阀门遥控系统,就选无锡宏智铭科技,让您满意,欢迎您的来电哦!杭州船舶抗倾倒阀门遥控系统
船舶抗倾控制系统工作原理:
船舶抗倾控制系统的工作基于船舶的稳性原理。船舶的稳性是指船舶在外力矩(如风浪作用力矩)作用下偏离其初始平衡位置,当外力矩消失后船舶能够恢复到初始平衡位置的能力。数据采集阶段传感器不断采集船舶的倾斜角度、液舱液位等数据,并将这些数据以电信号的形式传输给控制单元。这些数据是系统进行后续操作的基础。分析判断阶段控制单元接收到数据后,根据船舶的设计参数(如船舶的型宽、型深、重心高度等)和稳性要求,利用稳性计算软件或算法对船舶的当前稳性状态进行评估。例如,通过比较当前倾斜角度与允许的比较大倾斜角度来判断船舶是否处于危险状态。执行阶段如果船舶处于危险的倾斜状态,控制单元会发出指令启动抗倾设备。以压载水系统为例,控制单元会根据船舶的倾斜方向和程度,计算出需要调整的压载水量和方向,然后控制压载水泵的工作,调整压载水舱内的水量分布,从而改变船舶的重心位置,产生一个与倾斜力矩相反的恢复力矩,使船舶恢复到平衡状态。 杭州船舶抗倾倒阀门遥控系统
上一篇: 营口船用配电厂家
下一篇: 营口阀门遥控系统定价