车载智能碰撞预警开发
ADAS安全驾驶预警系统的应用:ADAS驾驶辅助系统,包括了前车车距预警、前车启动提醒和车道偏离提醒功能,能帮助车主提升行车安全。ADAS的设置方法如下:双击屏幕,回到主界面。点击右上角设置图标。选择左边第三项“控制”,选择右边的“辅助驾驶(ADAS)”选项,点击打开或关闭。绿色为开启状态,白色为关闭状态。单击右边“车道偏移预警启动车速”菜单的公里数选项,可以选择车道偏移预警启动车速为始终、40公里时速、60公里时速和80公里时速,当选择始终时,无时速限制。汽车碰撞预警是ADAS高级驾驶辅助上的一种。车载智能碰撞预警开发
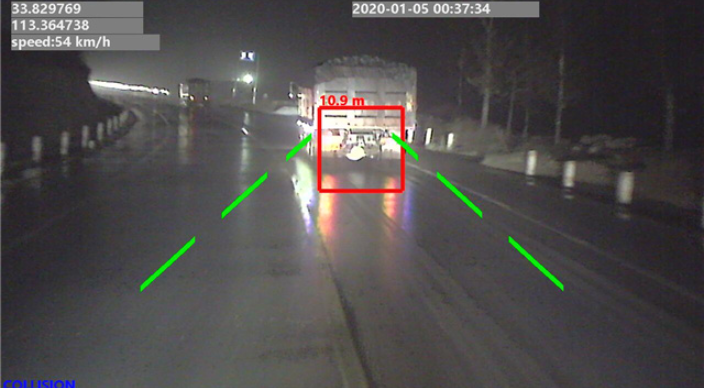
碰撞预警
“事故预警系统”它与行车电脑相连。它将车辆的行驶速度,车辆在地图中的定位等数据。整合后结合导航在车在LED上显示出来。这么说吧,我们可以在车载LED上看到,我们车辆在实时地图上的位置。以及在一定范围内的所有车辆和佩戴定位信标的行人,车辆上显示着速度、型号、车辆的行驶方向、车子的外形平面图和一些非机动车。在行驶中,当前方车辆突然减速或者发生故障而减速时,“事故预警系统”会给后方车辆发出语言预警,来提醒后方车辆及时的做出相应的操作。当有特殊车辆(救护车、救火车、警车)靠近是会及时提醒我们做出合理的避让。在一些陌生的路段,它会及时提醒我们一些路段的路规。车辆防碰撞碰撞预警系统汽车碰撞预警系统产品大小只如烟盒,隐蔽式设计不影响原车的外观与性能。

ADAS安全驾驶预警系统功能有哪些呢?(1)超时、超速的实时检测:通过GPS对车辆的行驶状态实时追踪定位,获取行驶的时间和速度信息,判断驾驶员是否超劳,车辆是否超速。(2)GPS/加速度计组合测速:利用惯性敏感器件加速度计解决GPS使在涵道、山谷内等,出现弱信号或无信号的定位问题,通过自适应卡尔曼滤波数据融合算法获取更精确的定位信息。(3)行驶状态检测:通过加速度传感器,对行车三维方向上的加速度值进行测量,判断车辆行驶是否超出加速度安全阈值。
ADAS安全驾驶预警系统通常包含哪些系统功能?碰撞避免或预碰撞系统;行人检测PED:一般的PED要区分出走路的和静止的人,并给出行人的位置和速度,如果行人在车辆行驶路线上,能给出重点提示及碰撞时间。现实中,人有走、跑、带着东西、推车等形态和动作,PED都要能处理这些状况,特别是人群检测,为避免重大事故,PED要给出额外的提醒。检测人行道、行人的动作和姿势,对汽车行驶的安全也有重要意义;夜视系统;自适应灯光控制;行人保护系统;自动泊车系统AP。伴随着声波、激光、电子技术的不断更新换代,碰撞预警系统的研究方向也在不断的变化。
碰撞预警系统的功能有哪些呢?自动屏蔽:1、开启转向灯屏蔽本系统自动报警、自动刹车功能:并线、超车或变向时,请开启相应方向的转向灯,当开启本车的左、右转向灯,本系统的自动报警、自动刹车功能此时处于屏蔽状态;当左、右转向灯系统关闭,本系统的防撞功能自动恢复到初始状态。2、开启双闪警示灯屏蔽本系统自动报警、自动刹车功能:当开启本车的双闪警示灯,本系统的自动报警、自动刹车功能处于屏蔽状态;当双闪警示灯系统关闭,本系统的防撞功能自动恢复到初始状态。疲劳驾驶预警系统在交通安全应用中发挥着越来越大的作用。汽车防碰撞碰撞预警系统作用
汽车碰撞预警系统有着数据检测、数据处理和方案执行的功能。车载智能碰撞预警开发
汽车自动防撞系统能够有效避免事故的发生:汽车盲区有很多种,除了车辆前、后部驾驶员视线无法看到的地方,车辆还有6大盲区,主要分布在左右前柱/左右中柱/左右后柱所遮挡的部位。左右前柱盲区应该是较危险,也是较常见的盲区之一,因为在行进中,左转时会有被左前柱遮挡的行人或障碍物。这时要减速慢行,通过时可让头部偏向一侧,左右环顾一下左前柱遮挡部位,排除被遮挡区域之后,安全通过。如果左前柱盲区内有行人或者车辆经过时,一定要减速观察再通过。左右后柱车盲区,初步估计了一下,得有超过10米的距离,十分危险,所以无论是往前走,还是倒车,尽量在确保没危险的前提下再开动车辆,避免事故的发生。车载智能碰撞预警开发
广州精拓电子科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在广东省等地区的汽摩及配件中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,广州精拓电子科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!
上一篇: 铲车360影像系统雷达预警
下一篇: 高速碰撞碰撞预警终端