天津4轴机器人激光焊接
华数SCARA四轴工业机器人整合了自动化组件(如伺服系统、视觉系统、线性模块等),轻松打造智能机器人工作站,大幅降低人力与时间成本,优化产品质量、提升效率。通过随线追踪,机器人飞拍,点位解析等软件加持,多样操作方案选择,简单使用好上手,优越的速度和良好的重复定位精度,线性度和垂直性能度,为广大制造商持续提供完善、高竞争力的行业整合解决方案。应用于消费性电子、电子电机、食品产业、橡塑胶产业、金属加工业、汽车零部件等。SCARA 四轴机器人具有使用场景广、配合度高、灵活、精度高、速度快等特点。天津4轴机器人激光焊接
华数机器人公司以现代控制理论、集成技术及信息技术来实现生产过程装配、检测、控制、装夹、定位、涂胶、旋紧固定等全自动化。可为汽车生产企业提供汽车门锁、汽车发动机、汽车尾气净化器、汽车安全气囊等自动装配检测生产线以及汽车冲压生产线。尤其在汽车覆盖件自动化冲压、汽车发动机装配检测、汽车零部件装配检测、助力机械手、物流输送等方面具有特别优势。应用多项新技术,采用循环流水作业方式完成的装配作业,多种形式的传送装置和方法,大幅提高生产线的运行速度和效率。为推广工业自动化技术和推动汽车工业进步开辟了新的应用领域和发展空间。为企业的实际应用提供经济、适用的自动化解决方案。现代汽车制造业不断向“准时化”和“精益生产”的方向发展,这对设备的快速响应、柔性化、集成化和多任务处理的能力提出了更高要求。立足客户,不断创新技术,为客户提供品质保证、多样化的产品与服务正是华数机器人的竞争力所在。作为业界**的机器人品牌,华数机器人将继续强化其在汽车制造领域应用地位,凭借技术和产品性能优势,不断开拓新市场、发展新领域,助力汽车制造业装备智能化。天津4轴机器人激光焊接在自动化生产线中,主要的“部件”工业机器人的选择就是中之重了!
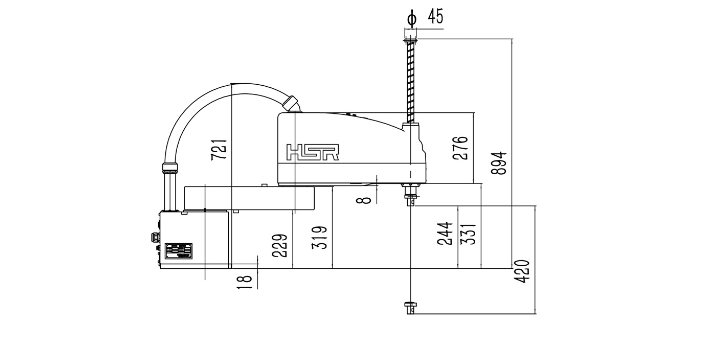
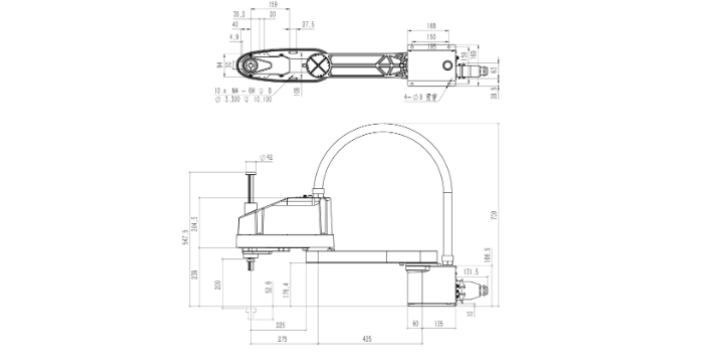
HSR-Scara系列是专门针对桌面拾取安装应用而开发的机器人。依托华中数控多年伺服控制的技术积累,使用自主研发的控制技术,巧妙地运用伺服电机的性能,具有高速度、高性能、高精度、体积小、运动灵活和低价格的优势。其串联的一轴和第二轴类似于人的手臂可快速在平面内进行定位和定向,可以伸进有限空间中作业后收回。●高速循环时间使零部件吞吐量得到提升;●出色的加/减速度,匹配平稳的启动/停止时间;●高速循环时间低至0.4S,使零部件可快速、准确地运行;●负载覆盖6公斤以下,即使负载增加,也可保持高速循环。●精密的机械加工,多道加工工序,完善的装配管控;●使用国外先进的成套测量标定设备DYNALOG进行轨迹精度测试,严格精度把关;●出厂前稳定性测试长达7*24小时以上,保证质量的稳定。●丰富的用户接头,本体内部走线集成了伺服电机动力线和编码线以及方便用户使用的DB15接头、三个φ6的气管接头,既保持整体外观,也方便夹具接线应用;●3轴丝杆中空设计,用户气管可直通底部,安装吸盘即可实现拾取;●轻松拖曳即可推动机器人进行示教,定位记录更加准确方便;
SCARA工业机器人的发展方向:一、工业机器人应用技术SCARA工业机器人的应用技术主要包括两个方面,一是利用计算机技术的先进性,实现工业机器人的工作效率,以及它们在复杂工作环境中工作精度;二是利用先进的传感器技术,提高工业机器人的柔性,增强它对于工作的环境的适应能力,同时降低操作人员参与的复杂性,并极大的延展其适用的领域。第二、工业机器人控制技术目前随着技术人员的不懈努力,SCARA工业机器人控制技术现已实现了全数字化控制,目前重点研究开放式模块化和控制系统,人机界面将更加友好,具有良好的语言及图形编辑界面。同时,工业机器人的控制器的标准化和网络化,进一步提高在线编程的可操作性之外,离线编程的使用化将成为重点研究内容。结合在细分领域应用的特点,华数机器人在结构、算法上做了多方面的创新。

SR系列四轴工业机器人产品特性:一、SR系列四轴工业机器人结构特性SCARA是一种圆柱坐标型的特殊类型的工业机器人,SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动。SCARA系统在x、y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作。其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件。SCARA机器人在选型时应考虑工作臂的长度和Z轴的负载能力,现场安装情况,产品使用要求,周边环境的要求等。中山4轴机器人视觉点胶
SCARA机器人也称为四关节机械手,其精度高、体积小,灵活性强,相比六轴机器人成本低。天津4轴机器人激光焊接
协作机器人优缺点:一、优点:1)人机协作:充分发挥人与机器人的优势,依靠人解决精度及模糊控制问题,依靠机器人解决力控及稳定性能问题;2)安全性高:采用先进的传感器,主动感知和适应变化的环境,控制算法添加防碰撞功能,规避与外部碰撞风险;3)灵活易用:协作机器人主要突破点为软件控制系统,实现简便操控、编程;小型、轻巧、可移动、安装方便、即插即用。二、缺点: 1)负载低:一般在10kg以下;2)结构刚性弱:较小的自重导致刚性不足;3)速度慢:协作机器人要确保安全性,其电机需要兼顾安全保护的功能;4)重复定位精度:相比传统机器人一般低一个数量级;5)价格较高:为达到安全标准,还需要增加很多的安全传感器。天津4轴机器人激光焊接
上一篇: 安徽4轴机器人分拣
下一篇: 佛山三轴点胶软件订制