广州本地力控打磨控制系统
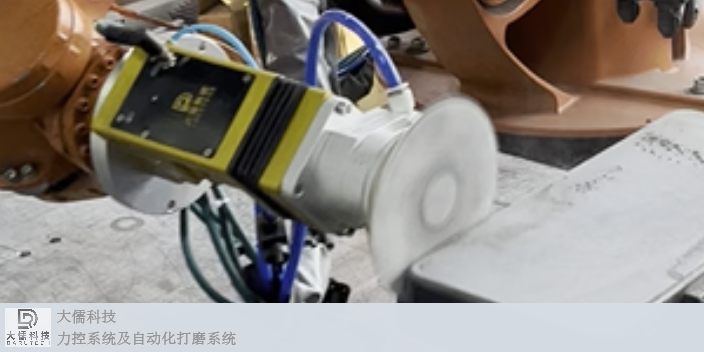
随着社会的发展和科技的进步,人们对工件的外观面要求逐渐变高,因此需要对工件进行打磨工艺,当需要打磨大批量工件,而且工件的内壁面和外壁面同时都需要打磨时,如果采用传统的流水线制作模式,通过人工打磨效率低,同时打磨后的效果得不到保证,综合成本高,且打磨后的碎屑容易残留在工件上,不利于标准化生产。目前在工件加工完成后经常需要使用打磨机对其包面进行打磨,使其表面光滑均匀。现有的打磨机一般均为手持式打磨机,工作人员需要手持打磨机然后对工件表面进行打磨处理。这种方式存在以下缺陷:在面对圆柱形杆或者是圆柱形管等圆形形的工件时,因为工件表面均为弧面,工作人员对工件打磨时比较费力,且打磨出来的工件表面很难保持平整性,很有可能影响后续工件的使用。针对现有技术存在的不足,大儒的只能柔性打磨力控系统具有的打磨过程中的柔性力控制,能帮助工作人员更方便打磨圆柱形工件。广州本地力控打磨控制系统

因六关节机器人在定位精度、运动耦合方面表现出极大的优势,且工作空间大、工件易于夹持,其在自动化打磨应用中,包括抛光、打磨、去毛刺等方面的应用越来越普遍,但同时也面临许多挑战:1)打磨过程是一个复杂的工艺过程,对其机理的研究还不够深入,使得自由曲面的打磨加工成为模具生产、制造中的薄弱环节和制约模具制造业发展的瓶颈;2)待加工表面复杂多样,需要一种灵活的、适应性强的方式来控制打磨的精度。目前,打磨行业里应用机器人仍主要采用示教的方式,通过离线移动机器人到达目标点,然后通过机器人编程语句逐点记录。其中,为了得到要求的表面加工精度,还需要操作人员在过渡处插补点位以光顺过渡调整机器人的位姿。要完成一个复杂件的打磨作业,需要数天的示教及调试,容易出错,且对操作人员的熟练程度要求很高。郑州精密力控打磨操作简单

打磨工具应用于产品表面加工,用以实现产品的去披锋、修边、打磨和抛光等工艺需求。打磨工具工作时,磨片与待打磨产品之间接触的力为打磨压力,打磨压力过大会损坏磨片和电机主轴,甚至会造成产品表面有凹坑,打磨压力过小会影响打磨效果,且该打磨压力需要随着产品的形变量、产品的材料及工艺的改变而进行调整。但是当待打磨的产品尺寸存在偏差或者材料发生改变时,常规的打磨工具无法适应性地改变其打磨压力,容易造成磨片损坏,且影响产品的打磨效果。大儒科技的智能柔性打磨力控系统,也是一种恒力打磨工具,可以提供可调节打磨压力、提高打磨效果、延长磨片使用寿命。力控系统可安装于工业机器人的第六轴或者安装于非标机械手的末端,以实现对产品的打磨。打磨力控系统安装于机器人或者机械手上,在进行批量打磨时,会提前设定好打磨路径,若待打磨的产品存在形变量时,采用普通的打磨工具,即采用无法设置打磨压力的打磨工具将会产生打磨效果不佳的问题,当待打磨的产品往远离磨片的方向变形时,磨片接触不到产品,会导致漏打磨;当待打磨的产品往靠近磨片的方向变形时,可能会损坏磨片,也会造成多打磨的情况。
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。
焊缝打磨包括:平面焊缝余高打磨、曲面焊缝余高打磨、不规则焊缝打磨。对于前两种情况,激光测距仪实时反馈方焊缝的余高以及左右的距离信息,通过内部算法实时计算,调整打磨工具高度与打磨位置,自适应补偿工件本体、焊接过程以及工装所导致的误差,就能实现柔性打磨加工作业。但对于不规则焊缝打磨,除了要定位位置和检测余高之外,还需要准确识别,因此要采用3D视觉检测系统,3D镜头+算法的测量模式,对工件焊缝3D扫描数据进行分析,实现焊缝的识别、准确定位和测量,对焊缝进行智能打磨。木材制品打磨有其行业标准:AQ4228-2012木材加工系统粉尘防爆安全规范,规定了工业生产中木材及木制品、人造板、木粉的加工处理系统中产生的木质及其他纤维质材料的粉尘的防爆安全要求。所以,用于这方面的机器人需为防爆机器人,若没有防爆系统,那必须给机器人穿上防爆外衣,这样可以很大程度上降低粉尘爆燃的风险。安徽销售力控打磨
广州本地力控打磨控制系统
打磨机器人在卫浴五金这个行业的应用,大多数情况下要配合打磨抛光力控系统。因为这个行业的产品大多是不规则的,类似水龙头、门把手等工件,外形曲面、曲线比较复杂,因此多方面配合完成。首先是编程调试;第二是柔性力控制,通过打磨机进行磨削,要求能够快速响应磨削应力的变化,保证力控具有一定精度;第三是自动位置/磨损补偿功能,这可以跟踪检测耗材的磨损情况,适时调整打磨轨迹,保证打磨质量,通过压力补偿、速度补偿来实现。在精度上,像传统的一定定位精度,力控系统通过DH补偿、重力补偿、多点标定、误差补偿算法,将一定定位精度提升到±。另外就是一定路径保持,因为在整个运动过程中,路径跟踪精度也是需要保持的。以往经验来看,当机器人在低速运行时,是能很好的按照规定路线运行的,但在高速时就会存在偏差,这就好比弯道超车。力控系统通过改进路径算法,摆脱了这个困扰,实现了路径与速度无关,任何速度下机器人行走的路径都相同,防止低速示教后高速运行时路径变化导致碰撞。以上是力控系统的金属加工及打磨抛光的分享。广州本地力控打磨控制系统
大儒科技(苏州)有限公司位于方泾路2号,交通便利,环境优美,是一家服务型企业。大儒科技是一家私营有限责任公司企业,一直“以人为本,服务于社会”的经营理念;“诚守信誉,持续发展”的质量方针。公司拥有专业的技术团队,具有力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人等多项业务。大儒科技顺应时代发展和市场需求,通过**技术,力图保证高规格高质量的力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人。
上一篇: 厦门什么是力控打磨现价
下一篇: 通用力控打磨