浙江工厂自动化配件生产
霍尔电压随磁场强度的变化而变化,磁场越强,电压越高,磁场越弱,电压越低。霍尔电压值很小,通常只有几个毫伏,但经集成电路中的放大器放大,就能使该电压放大到足以输出较强的信号。若使霍尔集成电路起传感作用,需要用机械的方法来改变磁场强度。下图所示的方法是用一个转动的叶轮作为控制磁通量的开关,当叶轮叶片处于磁铁和霍尔集成电路之间的气隙中时,磁场偏离集成片,霍尔电压消失。这样,霍尔集成电路的输出电压的变化,就能表示出叶轮驱动轴的某一位置,利用这一工作原理,可将霍尔集成电路片用作用点火正时传感器。霍尔效应传感器属于被动型传感器,它要有外加电源才能工作,这一特点使它能检测转速低的运转情况。机械自动化配件传感器可以满足信息的显示。浙江工厂自动化配件生产

集成传感器是用标准的生产硅基半导体集成电路的工艺技术制造的。通常还将用于初步处理被测信号的部分电路也集成在同一芯片上。薄膜传感器则是通过沉积在介质衬底(基板)上的,相应敏感材料的薄膜形成的。使用混合工艺时,同样可将部分电路制造在此基板上。厚膜传感器是利用相应材料的浆料,涂覆在陶瓷基片上制成的,基片通常是Al2O3制成的,然后进行热处理,使厚膜成形。陶瓷传感器采用标准的陶瓷工艺或其某种变种工艺(溶胶、凝胶等)生产。河南五金自动化配件厂家机械自动化配件伺服驱动器可以实现比较复杂的智能化。

传感器主要特性:灵敏度:灵敏度是指传感器在稳态工作情况下输出量变化△y对输入量变化△x的比值。它是输出一输入特性曲线的斜率。如果传感器的输出和输入之间显线性关系,则灵敏度S是一个常数。否则,它将随输入量的变化而变化。灵敏度的量纲是输出、输入量的量纲之比。例如,某位移传感器,在位移变化1mm时,输出电压变化为200mV,则其灵敏度应表示为200mV/mm。当传感器的输出、输入量的量纲相同时,灵敏度可理解为放大倍数。提高灵敏度,可得到较高的测量精度。但灵敏度愈高,测量范围愈窄,稳定性也往往愈差。
驱动器细分后将对电机的运行性能产生质的飞跃,但是这一切都是由驱动器本身产生的,和电机及控制系统无关。在使用时,用户需要注意的一点是步进电机步距角的改变,这一点将对控制系统所发的步进信号的频率有影响,因为细分后步进电机的步距角将变小,要求步进信号的频率要相应提高。以1。8度步进电机为例:驱动器在半步状态时步距角为0。9度,而在十细分时步距角为0。18度,这样在要求电机转速相同的情况下,控制系统所发的步进信号的频率在十细分时为半步运行时的5倍。机械自动化配件伺服驱动器使用是伺服驱动器在当今比较重要的技术课题。
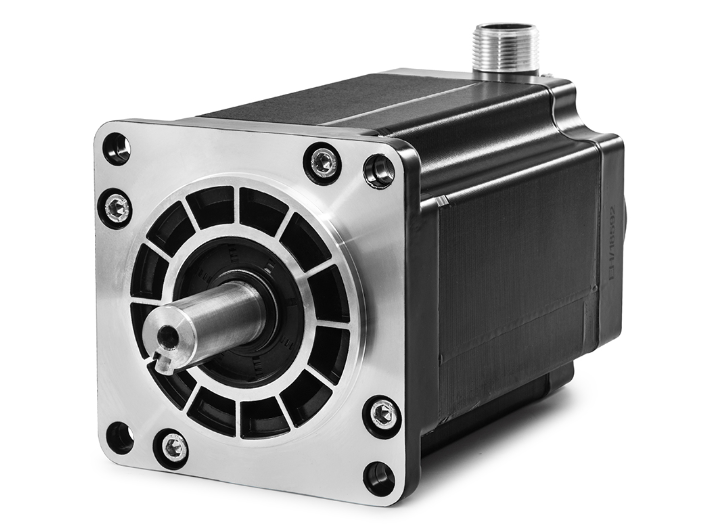
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。广泛应用于雕刻机、水晶研磨机、中型数控机床、电脑绣花机、包装机械、喷泉、点胶机、切料送料系统等分辨率较高的大、中型数控设备上。机械自动化配件包括驱动控制器。浙江工厂自动化配件生产
机械自动化配件伺服驱动器被广泛应用于工业机器人及数控加工中心等自动化设备中。浙江工厂自动化配件生产
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降甚至于丢失。因此电机外表允许的较高温度应取决于不同电机磁性材料的退磁点。一般来说,磁性材料的退磁点都在130摄氏度以上,因此步进电机外表温度在80~90摄氏度完全正常。常见问题:噪声大。解决方法:如步进电机正好工作在共振区,可通过改变减速比提高步进电机运行速度。采用带有细分功能的驱动器,这是较常用的,较简便的方法。因为细分型驱动器电机的相电流变化较半步型平缓。换成步距角更小的步进电机,如三相或五相步进电机,或两相细分型步进电机。换成直流或交流伺服电机,几乎可以完全克服震动和噪声,但成本较高。在电机轴上加磁性阻尼器,市场上已有这种产品,但机械结构改变较大。浙江工厂自动化配件生产
上一篇: 重庆30千瓦机电多少钱
下一篇: 四川直流驱动器生产厂家