成都购买力控打磨欢迎选购
机器人自动化打磨抛光适用于各种类型工件和材料打磨抛光工艺的各个方面,常规复杂形状工件的抛光需要由人工完成,不仅加工效率低、产品一致性难以保证、生产人员工作环境恶劣,同时管理成本较高,随着用工成本和技工不确定性风险的上市,利用人口红利创造产品利润的时代已经结束。自动化打磨方式使用先进DFC力控制技术使得打磨力控打磨能够处理各种复杂形状的工件,并且保证了工件的加工质量和产品的一致性。通过在机器人上的DFC力控打磨执行器,以及线性链接的DFC力控打磨控制器,结合工件与打磨工具的磨损消耗计算方程,使得系统能够实现复杂磨削,随形抛或安装三维数模尺寸抛都成为可能。实时反馈并控制打磨力在设定范围内,在线质量控制等功能,极大地提高了产品加工效率,并保证了加工工件的质量高度一致性。力控打磨 ,就选大儒科技(苏州)有限公司,有需要可以联系我司哦!成都购买力控打磨欢迎选购

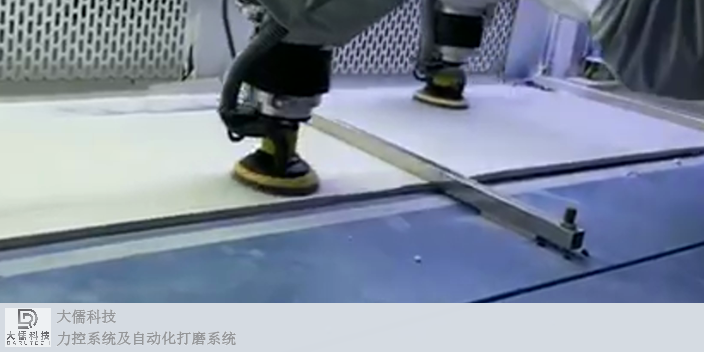
常规的打磨方案采用人工打磨,生产效率低,工作周期长,而且精度不高,产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。基于力控的打磨抛光机器人能够实现高效率、高质量的自动化打磨,是替代人工打磨的行之有效的解决方案。力控打磨机器人系统由以下几部分组成:工业机器人、力控打磨、打磨工具、工作台。力控打磨机器人是力控制技术为主,通过控制加工轨迹和打磨工具与工件的接触力,以满足柔性力和位置两方面的工艺要求,保证打磨质量。力控打磨系统适应各种工业机器人,通过力控打磨控制打磨加工过程,使机器人具备了良好的对接触力感知和控制能力,实现了高效率高质量的自动化打磨过程。北京购买力控打磨技术指导大儒科技(苏州)有限公司为您提供力控打磨 ,有需要可以联系我司哦!

电气柜制作材料一般分为热轧钢板和冷轧钢板两种。冷轧钢板相对热轧钢板更材质柔软,更适合电气柜的制作。电气柜用途主要用于化工行业,环保行业,电力系统,冶金系统,工业,核电行业,消防安全监控,交通行业等等。在电气柜加工过程中涉及切割、冲孔、抛光和打磨等工艺,传统的抛光方式是操作人员手持抛光机对板材进行抛光,由于人手持抛光机,无法控制一直走直线,导致抛光效果不佳,实用性较低。打磨力控打磨安装在机器人上,力控打磨可使抛光面均匀平整,提高抛光质量,提高工作效率。打磨力控打磨其安装方式、连接方式或设置方式均很简单,客户的技术人员只需按照其附带的使用说明书进行安装和操作即可快速投入打磨生产。
DFC力控打磨末端安装不同种类的气动研磨工具,使其更适合各种汽车,木工家具,3C产业的表面砂打磨和砂光。气动打磨机研磨速度快,有效缩短作业时间;轻巧、平衡性高、使用长时间不易疲劳;使用木工家具、轻毂、金属研磨、汽车钣金涂装、研磨、修面,羽状边研磨。气动长指头式砂光机用于狭小,复杂,难进入研磨的部位研磨;木器外壳,手机外壳轮圈研磨。狭小不易研磨的曲面,也可完美解决,操作容易适合小角度,死角处研磨。气动拉丝机为您解决金属制品的划痕,焊接后的打磨抛光与各种纹路的修复问题,处理的纹路修复效果(真丝纹,雪花纹,段纹,亚光,镜面等)能完全跟您要求的原版纹路。要配相应的耗材。用于电器(微波炉、抽烟机、消毒柜)电梯、厨具、不锈钢货架、扶手、地铁车厢、食品机器、化工容器、不锈钢装潢等不锈钢行业。气动抛光机超小型设计,使用与狭窄作业等’适用于除锈磨平、毛边处理等;人体工程学设计方便灵活操作。注水式气动砂光机专业打磨大理石倒角抛光,带有充水、设计轻巧;没有漏电危险,可供使用者放心使用。气动砂带机适用于木器、塑料、玻璃、金属制品、家具、手机外壳;从粗磨到表面抛光皆可使用;去除表面刮痕和利角毛边。力控打磨 ,就选大儒科技(苏州)有限公司,用户的信赖之选,有想法可以来我司咨询!
电气柜是由钢材质加工而成用来保护元器件正常工作的柜子。电气柜制作材料一般分为热轧钢板和冷轧钢板两种。冷轧钢板相对热轧钢板更材质柔软,更适合电气柜的制作。电气柜用途主要用于化工行业,环保行业,电力系统,冶金系统,工业,核电行业,消防安全监控,交通行业等等。在电气柜加工过程中涉及切割、冲孔、抛光和打磨等工艺,传统的抛光方式是操作人员手持抛光机对板材进行抛光,由于人手持抛光机,无法控制一直走直线,导致抛光效果不佳,实用性较低。打磨力控打磨安装在机器人上,力控打磨可使抛光面均匀平整,提高抛光质量,提高工作效率。打磨力控打磨其安装方式、连接方式或设置方式均很简单,客户的技术人员只需按照其附带的使用说明书进行安装和操作即可快速投入打磨生产。大儒科技(苏州)有限公司力于提供力控打磨 ,欢迎您的来电哦!浙江本地力控打磨来电咨询
大儒科技(苏州)有限公司为您提供力控打磨 ,欢迎您的来电!成都购买力控打磨欢迎选购
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。成都购买力控打磨欢迎选购
上一篇: 北京精密力控打磨装置
下一篇: 湖州通用柔性打磨