南通Ether CAT协议绝对值编码器价格
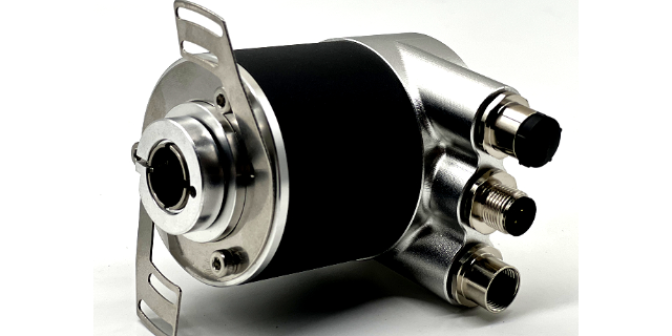
Ether CAT单圈绝对值编码器:机械参数最大转速6000转/分主轴负载轴向40N,径向100N主轴材质不锈钢外壳材质铝抗冲击1000m/s²(6ms),等于100g抗振动200m/s²(10-2000Hz),等于20g允许轴向窜动±1.5mm允许径向跳动±0.2mm外形结构60mm外径,实心轴,盲孔轴连接形式侧出M12插头(后出M8可选)。编码器技术:磁电单圈分辨率:12位、13位、14位可选配置文件CoE(基于EtherCAT的CANopen,DS-301+DS406)输出的信号EtherCAT传输速率10/100Mbit。桁萱自动化科技(上海)有限公司致力于提供绝对值编码器,有想法的不要错过哦!南通Ether CAT协议绝对值编码器价格

EtherCAT总线绝对值编码器使用注意事项:1.确保EtherCAT总线的通信速度和稳定性,以保证绝对值编码器的数据传输和接收的准确性。2.在使用EtherCAT总线绝对值编码器时,需要对其进行正确的配置和参数设置,以确保其能够正常工作。3.在安装和使用EtherCAT总线绝对值编码器时,需要注意其电气连接和接线方式,以避免电气故障和损坏。4.在使用EtherCAT总线绝对值编码器时,需要注意其防护等级和环境要求,以确保其能够在恶劣的工作环境下正常工作。5.在使用EtherCAT总线绝对值编码器时,需要注意其维护和保养,定期检查和清洁,以确保其长期稳定工作。无锡Ether CAT绝对值编码器厂家绝对值编码器,就选桁萱自动化科技(上海)有限公司,让您满意,期待您的光临!

EtherCAT总线绝对值编码器的工作原理如下:1.传感器:绝对值编码器通过传感器将旋转角度转换为数字信号。2.EtherCAT总线:编码器通过EtherCAT总线将数字信号传输到控制器。3.控制器:控制器接收编码器传输的数字信号,并将其转换为机器人或其他设备的控制信号。4.反馈:编码器通过EtherCAT总线向控制器提供反馈,以确保机器人或其他设备按照预定的角度旋转。总之,EtherCAT总线绝对值编码器通过传感器将旋转角度转换为数字信号,并通过EtherCAT总线将其传输到控制器,以控制机器人或其他设备的旋转角度。同时,编码器还提供反馈,以确保旋转角度的准确性。
EtherCAT总线值编码器的工作原理如下:1.EtherCAT总线值编码器通过在轴上安装编码器来测量轴的位置和速度。2.编码器将位置和速度信息转换为数字信号,并将其发送到EtherCAT总线。3.EtherCAT总线将这些数字信号传输到控制器,控制器可以使用这些信息来控制轴的运动。4.由于EtherCAT总线是一种高速、实时的通信协议,因此可以实现非常精确的位置和速度控制。5.值编码器可以提供轴的位置信息,这意味着即使系统断电或重新启动,控制器也可以知道轴的准确位置。6.EtherCAT总线编码器通常用于需要高精度位置控制的应用,例如机床、印刷机、自动化生产线等。桁萱自动化科技(上海)有限公司绝对值编码器值得用户放心。
EtherCAT总线编码器怎么使用:EtherCAT总线编码器的使用步骤如下:1.确定EtherCAT总线编码器的型号和参数,并根据需要进行配置。2.将EtherCAT总线编码器连接到EtherCAT总线上,可以使用标准的EtherCAT连接器或者自定义连接器。3.在控制器中配置EtherCAT总线编码器的参数,例如分辨率、编码类型、输出模式等。4.在程序中使用EtherCAT总线编码器的API函数读取编码器的数据,例如位置、速度、加速度等。5.根据需要对编码器的数据进行处理和控制,例如计算位置误差、调整运动轨迹等。6.在程序中实现EtherCAT总线编码器的故障检测和报警功能,例如检测编码器的通信状态、电源状态等。需要注意的是,使用EtherCAT总线编码器需要具备一定的硬件和软件开发能力,建议在专业人员的指导下进行操作。桁萱自动化科技(上海)有限公司致力于提供绝对值编码器,期待您的光临!苏州Ether CAT本安编码器价格
桁萱自动化科技(上海)有限公司为您提供绝对值编码器,欢迎新老客户来电!南通Ether CAT协议绝对值编码器价格
EtherCAT总线绝对值编码器的安装和调试步骤如下:1.确定编码器的安装位置和方向,并将其固定在机械结构上。2.连接编码器的电源和信号线,确保连接正确无误。3.配置EtherCAT总线控制器的参数,包括通信速率、节点地址等。4.在EtherCAT总线控制器上添加编码器的节点,并设置其参数,如分辨率、零点校准等。5.进行编码器的零点校准,确保编码器输出的零位信号与机械结构的零位一致。6.进行编码器的角度校准,通过旋转机械结构,记录编码器输出的角度值,与实际角度进行比较,进行校准。7.进行编码器的运动测试,通过控制机械结构的运动,观察编码器输出的角度值是否与实际角度一致。8.调试完成后,保存参数并进行系统测试,确保编码器的正常工作。南通Ether CAT协议绝对值编码器价格
上一篇: SSI磁电多圈绝对值编码器采集
下一篇: 重庆多圈并行防爆绝对值编码器