工业机器人焊钳电路图
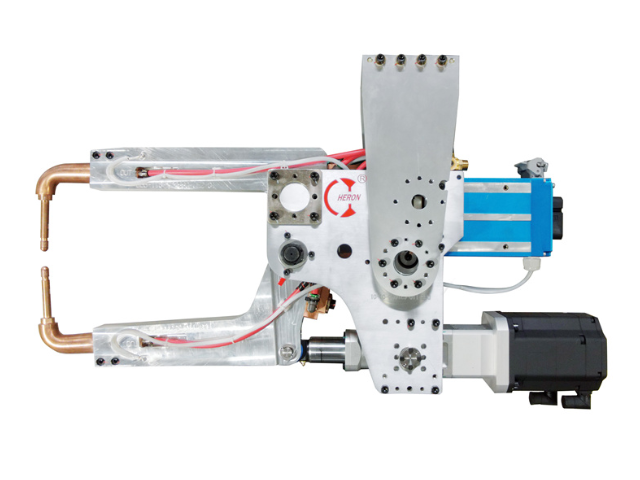
机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极是焊接时传递电流的部件,通常由铜制成。电极的形状和大小可以根据焊接工件的形状和大小进行设计。3.冷却系统:焊接时会产生大量的热量,需要通过冷却系统来降温。冷却系统通常由水冷或气冷组成。4.传感器:传感器用于检测焊接工件的位置和形状,以便机器人可以准确地夹持焊接工件和进行焊接。5.控制系统:控制系统用于控制机器人焊钳的运动和焊接参数,包括焊接电流、焊接速度、焊接时间等。总之,机器人焊钳的结构设计需要考虑到焊接工件的形状和大小,以及焊接质量和效率的要求。通过合理的结构设计和控制系统,机器人焊钳可以实现高效、精确、稳定的自动化焊接。机器人焊钳是一种高效、精确的焊接工具,能够在短时间内完成复杂的焊接任务。工业机器人焊钳电路图

机器人焊钳的精度是非常高的,可以达到毫米级别的精度。这是因为机器人焊钳采用了先进的控制系统和传感器技术,可以实现高精度的运动控制和位置定位。此外,机器人焊钳还可以根据不同的焊接任务进行自适应调整,以保证焊接质量和精度。机器人焊钳的精度对于焊接质量和效率都有着重要的影响。高精度的焊接可以保证焊接接头的质量和稳定性,从而提高产品的可靠性和耐久性。同时,高精度的焊接还可以减少焊接过程中的误差和浪费,提高生产效率和成本效益。总之,机器人焊钳的精度是非常高的,可以满足各种焊接任务的要求,是现代制造业中不可或缺的重要工具。工业机器人焊钳电路图机器人焊钳的操作简单,能够降低人员培训成本和时间。
机器人焊钳的自动化程度可以从以下几个方面进行评估:1.焊接精度:机器人焊钳的自动化程度可以通过焊接精度来评估。焊接精度越高,机器人焊钳的自动化程度就越高。高精度的焊接可以保证焊接质量,提高生产效率。2.焊接速度:机器人焊钳的自动化程度还可以通过焊接速度来评估。焊接速度越快,机器人焊钳的自动化程度就越高。高速焊接可以提高生产效率,降低生产成本。3.操作简便性:机器人焊钳的自动化程度还可以通过操作简便性来评估。操作简便性越高,机器人焊钳的自动化程度就越高。简便的操作可以降低操作难度,提高生产效率。4.自动化程度:机器人焊钳的自动化程度还可以通过自动化程度来评估。自动化程度越高,机器人焊钳的自动化程度就越高。高度自动化的机器人焊钳可以实现无人化生产,提高生产效率。综上所述,机器人焊钳的自动化程度可以从焊接精度、焊接速度、操作简便性和自动化程度等方面进行评估。
机器人焊钳相比人工焊接具有以下优势:1.精度高:机器人焊钳具有高精度的定位和控制能力,能够保证焊接质量的稳定性和一致性。2.生产效率高:机器人焊钳可以实现连续、高速、长时间的工作,很大程度的提高了生产效率和产量。3.节省人力成本:机器人焊钳可以代替人工完成繁琐、危险、重复性高的工作,节省了人力成本和劳动力。4.适应性强:机器人焊钳可以根据不同的焊接需求进行编程和调整,适应性强,可以适用于不同的焊接工艺和材料。5.安全性高:机器人焊钳可以在高温、高压、有毒、有害等危险环境下工作,保证了操作人员的安全。6.数据记录方便:机器人焊钳可以记录每一次焊接的数据,方便后期的质量检测和追溯。机器人焊钳的使用可以提高生产线的自动化程度,实现智能化生产。
机器人焊钳在焊接过程中,材料变形是一个常见的问题。这是因为焊接时会产生高温,导致材料膨胀和收缩,从而导致变形。为了防止材料变形,可以采取以下措施:1.控制焊接温度:通过控制焊接温度,可以减少材料的膨胀和收缩。可以使用低温焊接或者采用预热的方法来控制焊接温度。2.采用适当的焊接技术:不同的焊接技术对材料的变形影响不同。选择适当的焊接技术可以减少材料的变形。例如,采用点焊或者激光焊接可以减少材料的变形。3.采用适当的焊接参数:焊接参数的选择对材料的变形也有很大的影响。选择适当的焊接参数可以减少材料的变形。例如,选择适当的焊接速度和焊接电流可以减少材料的变形。4.采用适当的夹具:夹具的选择对材料的变形也有很大的影响。选择适当的夹具可以减少材料的变形。例如,采用弹性夹具可以减少材料的变形。总之,机器人焊钳在焊接过程中,通过控制焊接温度、选择适当的焊接技术和参数、以及选择适当的夹具,可以有效地防止材料的变形。机器人焊钳的使用可以大幅降低人力成本,提高生产效率,降低生产成本。四川C型机器人焊钳批发
机器人焊钳的使用能够减少环境污染和能源消耗,符合可持续发展的要求。工业机器人焊钳电路图
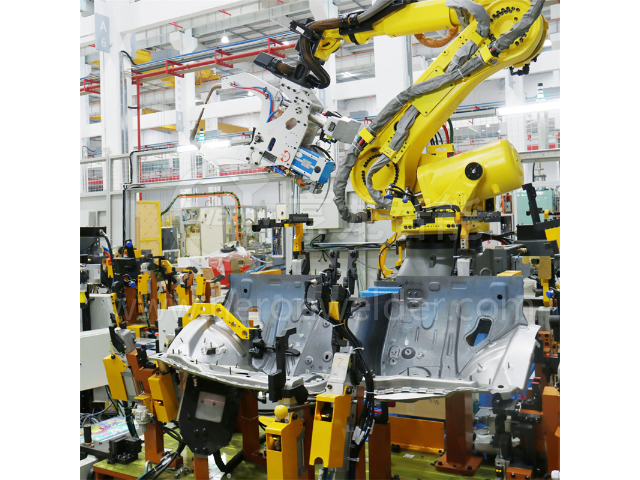
机器人焊钳的操作原理是通过程序控制机器人的动作,将焊钳移动到需要焊接的位置,然后进行焊接操作。机器人焊钳通常由机器人手臂、焊钳、焊接电源、控制系统等组成。首先,机器人手臂会根据程序指令移动到需要焊接的位置,然后焊钳会夹住需要焊接的工件。接着,焊接电源会提供所需的电流和电压,将焊接材料加热至熔化状态,使其与工件融合在一起。焊接完成后,机器人手臂会将焊钳移开,完成一次焊接操作。机器人焊钳的操作原理主要依赖于程序控制和自动化技术,可以实现高效、精确的焊接操作,提高生产效率和产品质量。同时,机器人焊钳还具有安全、稳定、可靠等优点,可以在恶劣环境下进行焊接操作,减少人工干预,降低劳动强度和安全风险。工业机器人焊钳电路图
上一篇: 深圳汽车门框逆变焊机费用
下一篇: 广州全自动机器人焊钳批发