销售轴焊接定制
六轴焊接机器人比四轴焊接机器人多两个关节,因此有更多的“行动自由度”。六轴机器人的个关节能像四轴机器人一样在水平面自由旋转,后两个关节能在垂直平面移动。此外,六轴机器人有一个“手臂”,两个“腕”关节,这让它具有人类的手臂和手腕类似的能力。六轴机器人更多的关节意味着他们可以拿起水平面上任意朝向的部件,以特殊的角度放入包装产品里。他们还可以执行许多由熟练工人才能完成的操作。首先来说说四轴焊接机器人,小型装配机器人中,“四轴机器人”是指“选择性装配关节机器臂”,即四轴机器人的手臂部分可以在一个几何平面内自由移动。机器人的前两个关节可以在水平面上左右自由旋转。第三个关节由一个称为羽毛的金属杆和夹持器组成。旋耕机轴焊接价格?致电连云港建博自动化设备有限公司!销售轴焊接定制
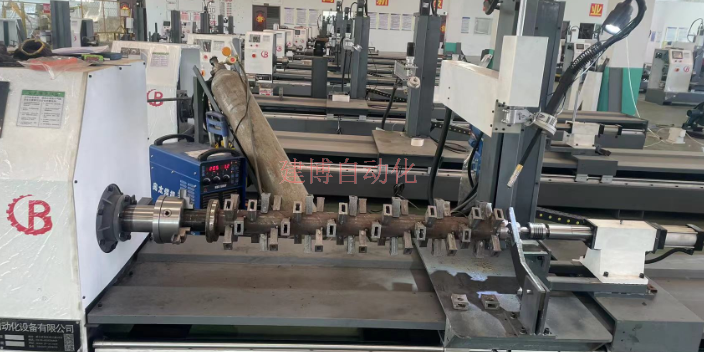
轴焊接
自动焊接设备在全位置焊中的应用以及价。在全位置焊中应用自动焊接设备,焊接执行部件采取旋转副驱动的方式,对焊枪姿态进行灵活且合理地改变,有利于全位置焊接工作的进行。同时在驱动相同焊接执行部件的时候,还可减小电机功率。在应用中,比较好将焊接位置上传感器安装于末级减速轴,以此对焊枪位置进行检测,采取这种安装方式,所获控制精度相对较高。此外,借助于全自动焊接设备上这一存储器,对部分焊接工艺的参数以及焊缝跟踪控制程序等进行存储,将焊接工艺参数储存于弧焊电源中,以此使弧焊电源所具优势更好地发挥,通过两者配合,有效地解决在全位置自动焊接作业中可能出现的各种质量问题。在焊枪驱动上借助于伺服电机来实施驱动,这种电机可把数字输入脉冲型号进行有效地转换,将其转换成为一种旋转运动,该元件自身的精度较高,不仅不会出现漂移问题,同时也不会出现累计误差等问题。在全位置焊接中应用这一元件,不仅不会使转速发生改变,同时控制频率信号也比较稳定,焊枪位移也更为准确。在全位置焊接作业中,将焊接机头与弧焊电源有机结合,不仅能够达到全位置自动焊接的目的,同时在一定程度上还可使自动焊接设备价格得到降低。销售轴焊接定制工业生产中常见的是四轴和六轴焊接机器人!
五轴焊接控制系统示教系统概述及示教基础知识:五轴焊接示教系统概述DMC650M-五轴焊接控制系统是基于六轴运动控制器DMC600M的硬件平台,在公司三轴仿形示教系统成熟的技术和范围较广的市场应用的基础上,根据市场需求,采纳了广大客户的宝贵意见,并参考国内外高级同类产品的一些功能及优点,经深圳市科瑞特自动化全体同仁的共同努力,推出的一款功能齐全、使用方便灵活的高级运动控制系统。在焊接机器人的设计中,焊枪移动模块的设计是整个系统设计的关键,特别是在应用上对其精度的要求比较高,因此必须对该部分的设计进行详细的指标分析和方案比较。在关键架构上,本文采用直线模组精密RV减速机直角坐标机器人系统。
在用旋耕机耕作前,先用秸秆还田机或者碎草机将杂草先打一遍,把草打碎以后,可以减少旋耕机缠草的现象。当然,这样的耕作成本会增加不少,但是对于开荒或者麦茬比较高的地块,可以考虑使用。当旋耕机箱体两侧缠草的时候,说明旋耕刀和箱体的间隙偏大。可以在旋耕机的箱体两侧刀轴各加两把七字刀,记得刀口要向外,也就是刀口不要向箱体。当地农机手为了减少旋耕机的缠草,更好地斩断秸秆,在旋耕机上自行焊接了横刀。其实就是在旋耕机的刀片上加角铁,一圈4根,直接焊接在旋耕刀背面。打桨水田机轴焊接类型?请您致电连云港建博自动化设备有限公司。

焊接机器人要完成焊接作业,必须依赖于控制系统与辅助设备的支持和配合。完整的焊接机器人系统般由机器人操作手、变位机、控制器、控制系统、焊接传感器、控制计算机和相应的安设备等组成。焊接机器人是通过示教编程完成焊接工作,示教编程是逐步完成的,操作人员在示教器中设置焊缝轨迹的关键点以及焊接参数,焊接参数主要包括焊接电流、焊接电压、焊接速度、送丝速度、焊枪位姿、摆动幅度等,工业焊接机器人可以记忆操作人员的操作,并自动生成连续执行操作的程序。在焊接技术领域,常见的有四轴焊接技术和六轴焊接技术。智能轴焊接厂家
轴焊接设备比人工焊接节省时间吗?销售轴焊接定制
焊接冶金过程在电弧焊过程中,液态金属、熔渣和气体三者相互作用,是金属再冶炼的过程。但由于焊接条件的特殊性,焊接化学冶金过程又有着与一般冶炼过程不同的特点。首先,焊接冶金温度高,相界大,反应速度快,当电弧中有空气侵入时,液态金属会发生强烈的氧化、氮化反应,还有大量金属蒸发,而空气中的水分以及工件和焊接材料中的油、锈、水在电弧高温下分解出的氢原子可溶入液态金属中,导致接头塑性和韧度降低(氢脆),以至产生裂纹。其次,焊接熔池小,冷却快,使各种冶金反应难以达到平衡状态,焊缝中化学成分不均匀,且熔池中气体、氧化物等来不及浮出,容易形成气孔、夹渣等缺陷,甚至产生裂纹。销售轴焊接定制
上一篇: 南京国内机器人规格
下一篇: 淮安靠谱的机器人设备制造