北京模块化机器人焊钳供应商
机器人焊钳的移动速度和焊接速度可以调整,这是因为机器人焊钳的控制系统可以通过编程来控制其运动和焊接速度。在焊接过程中,机器人焊钳需要根据焊接工艺要求和焊接材料的特性来调整其移动速度和焊接速度,以确保焊接质量和效率。移动速度是指机器人焊钳在焊接过程中移动的速度,它的调整可以影响焊接速度和焊接质量。如果移动速度过快,可能会导致焊接质量不稳定或者焊接缺陷;如果移动速度过慢,可能会影响焊接效率。因此,机器人焊钳的移动速度需要根据具体情况进行调整。焊接速度是指机器人焊钳在焊接过程中的焊接速度,它的调整可以影响焊接质量和焊接效率。如果焊接速度过快,可能会导致焊接质量不稳定或者焊接缺陷;如果焊接速度过慢,可能会影响焊接效率。因此,机器人焊钳的焊接速度需要根据具体情况进行调整。总之,机器人焊钳的移动速度和焊接速度可以调整,需要根据具体情况进行调整,以确保焊接质量和效率。机器人焊钳采用先进的自动化技术,能够实现高质量的焊接效果。北京模块化机器人焊钳供应商
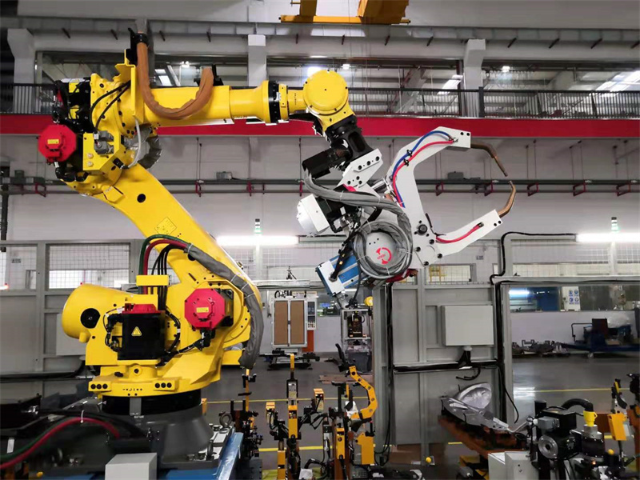
随着机械制造行业焊接任务的加剧,焊接作业本来就存在劳动条件差,热辐射较大,是一个危险性较强的职业,机械制造中也有很多大型设备,这也加大了焊接的难度,焊接机器人是从事焊接工作的自动机械设备,解放了工人劳动强度,帮助机械制造领域提高自动化水平。实现复杂工件的轻松焊接。工程机械制造行业中会出现很多非标工件的焊接,传统焊接容易导致焊接质量不均匀,智能焊接机器人搭配焊接变位机进行多方位灵活焊接,焊接变位机会对焊接机器人的灵活度进行补偿,提高焊缝的焊接精度,只需要根据行走路径设置好编程,就可以实现轻松焊接。西安汽车车身机器人焊钳供应商机器人焊钳的操作过程中不会受到外界干扰,能够保证焊接质量的稳定性。

机器人焊钳是一种自动化设备,用于在制造过程中进行焊接操作。它由机器人手臂和焊钳组成,可以在工业生产线上执行高精度的焊接任务。机器人焊钳的优点在于它可以提高生产效率和质量,减少人力成本和人为错误。它可以在短时间内完成大量的焊接任务,而且焊接质量稳定,不受人为因素的影响。此外,机器人焊钳还可以在危险环境下工作,如高温、高压、有毒气体等,保障工人的安全。机器人焊钳的应用范围非常广阔,在汽车制造中,机器人焊钳可以用于车身焊接、车门焊接、底盘焊接等任务。在电子制造中,机器人焊钳可以用于电路板的焊接。在建筑结构中,机器人焊钳可以用于钢结构的焊接。总之,机器人焊钳是一种高效、高精度、安全的自动化设备,可以提高生产效率和质量,减少人力成本和人为错误,广泛应用于各个领域。
机器人焊钳的维护和保养周期取决于多个因素,包括使用频率、工作环境、材料质量等。一般来说,机器人焊钳的维护和保养周期应该在每个月或每个季度进行一次,以确保其正常运行和延长使用寿命。在维护和保养机器人焊钳时,需要注意以下几点:1.清洁:定期清洁焊钳表面和内部,以防止灰尘和污垢积累,影响焊接质量。2.润滑:焊钳的运动部件需要定期润滑,以减少磨损和摩擦,延长使用寿命。3.检查:定期检查焊钳的电气连接和机械部件,确保其正常运行和安全性。4.更换:如果焊钳的零部件出现磨损或损坏,需要及时更换,以避免影响焊接质量和安全性。总之,机器人焊钳的维护和保养周期应该根据实际情况进行调整,以确保其正常运行和延长使用寿命。机器人焊钳的操作过程中,能够实现自动化清洗和维护,减少维护成本。
机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定。一般来说,焊接参数包括焊接电流、电压、焊接速度、焊接时间、焊接角度等。首先,焊接电流和电压是影响焊接质量的关键参数,需要根据焊接材料的种类、厚度、焊接位置等因素来确定。一般来说,焊接电流和电压需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整。其次,焊接速度和焊接时间也是影响焊接质量的重要参数。焊接速度需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整,而焊接时间则需要根据焊接材料的厚度、焊接位置等因素来进行调整。除此之外,焊接角度也是影响焊接质量的重要因素。焊接角度需要根据焊接材料的形状、焊接位置等因素来进行调整,以确保焊接质量和焊接强度。总之,机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定,需要进行多次试验和调整,以确保焊接质量和焊接强度。机器人焊钳的操作简单,能够降低人员培训成本和时间。西安点焊机器人焊钳品牌排行
机器人焊钳的操作过程中,能够实现自动化控制,减少人为干扰和误操作。北京模块化机器人焊钳供应商
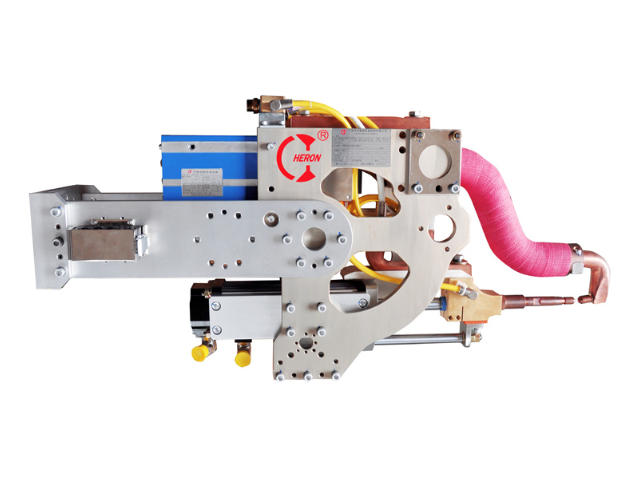
机器人焊钳的工作原理是通过控制系统控制机器人的运动,使其按照预定的路径和速度进行运动,同时通过传感器感知焊接过程中的温度、电流、电压等参数,实现焊接的自动化。具体来说,机器人焊钳的工作原理包括以下几个方面:1.控制系统:机器人焊钳的控制系统包括硬件和软件两部分,硬件包括电机、传感器、控制器等,软件包括程序和算法。控制系统可以实现机器人的运动控制、焊接参数的控制和监测等功能。2.机械结构:机器人焊钳的机械结构包括机械臂、焊钳、传动系统等,机械臂可以实现多自由度的运动,焊钳可以实现焊接操作,传动系统可以将电机的转动转化为机械臂的运动。3.传感器:机器人焊钳的传感器可以感知焊接过程中的温度、电流、电压等参数,通过传感器的反馈,控制系统可以实时调整焊接参数,保证焊接质量。4.焊接参数:机器人焊钳的焊接参数包括焊接电流、电压、速度、焊接时间等,这些参数可以根据焊接材料和焊接要求进行调整,以保证焊接质量。综上所述,机器人焊钳的工作原理是通过控制系统控制机器人的运动和焊接参数,实现焊接的自动化。机器人焊钳具有高效、精确、稳定的特点,可以提高焊接效率和质量。北京模块化机器人焊钳供应商
上一篇: 西安双机器人机器人焊钳设备
下一篇: 苏州双机器人机器人焊钳厂家