物流车多路360全景影像安装
360度全景倒车影像,是一套通过车载显示屏幕观看汽车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助汽车驾驶员更为直观、更为安全地停泊车辆的泊车辅助系统,又叫全景泊车影像系统或全景停车影像系统(有别于市面上把汽车四周画面在显示屏幕上进行分割显示的“全景”系统)。有的地方也称全车可视系统、全景可视系统、全景泊车系统、360度全车可视系统,它是后视倒车影像系统的升级换代产品,是真正意义上的“全景倒车影像系统”。360度全景便于两辆车之间夹缝同行。物流车多路360全景影像安装
360全景
车侣360全景影像系统与BSD(BlindSpotDetection)盲区预警系统融合使用可以带来以下几个方面的使用价值:1提高盲区监测能力:360全景影像系统可以提供的视觉信息,但在某些情况下,仍然可能存在无法覆盖的盲区区域,例如车身后方。而BSD盲区预警系统则能够利用特殊的传感器或摄像头来检测盲区内的车辆或物体。融合这两种技术可以提高盲区监测能力,减少盲区带来的安全隐患。实现及时的盲区预警:BSD盲区预警系统可以在检测到盲区内有其他车辆或物体时发出警示信号,提醒驾驶员注意。和360全景影像系统相结合,可以实现更准确、更及时的盲区预警,帮助驾驶员避免盲区内的危险情况,提高行驶安全性。增强驾驶辅助功能:融合360全景影像系统和BSD盲区预警的使用可以增强驾驶辅助功能。系统可以综合考虑全景影像系统的视觉信息和BSD盲区预警的监测结果,提供更、更可靠的驾驶辅助,帮助驾驶员在复杂交通环境中更加安全地变道、并线或停车。总之,360全景影像系统融合BSD盲区预警系统可以提高盲区监测能力、实现及时的盲区预警,并增强驾驶辅助功能。这样的融合使用可以提升驾驶安全性,减少盲区带来的危险情况,并为驾驶员提供更好的驾驶体验。 360环视摄像头安装360度全景影像系统在摄像机内参标定部分。

360度全景需要多久完成安装?360度全景市场上基本所有产品安装过程都需要3-5个小时,有的更长。为了能缩短安装时间,我们不断开发专车。拥有的专车全景支持市场上绝大部分车型,能匹配高中低各档车型。缩减了安装过程。安装完成后,非常重要的一步就是标定。相比市场上其他产品的繁琐的标定步骤,复杂的标定过程,动不动就是个把小时。我们根据大量实际标定案例,不断改善完善标定过程。形成了现在这套用比较少的步骤,跟着这个操作就可以完成标定的方法。:2分钟完成铺布,3分钟完成对点。从铺布到对点,熟练的师傅主要5分钟就可以完成。更有非常详细的标定手册,作为车主的你完全可以按照手册上的操作步骤,自行完成标定。
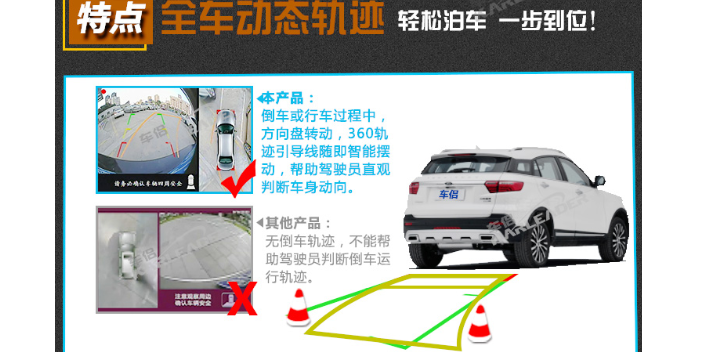
360全景影像怎么用?安装有360全景影像的车辆,在汽车启动后,便会自动开启。一些产品通过按键切换视角,有些配备中控屏幕的汽车,连接后则可以通过中控屏幕来操作切换视角。人坐在驾驶室内,视野是有盲区的,加装了360全景影像后,可以通过车载显示屏查看汽车周围的环境,视角更宽,能看的范围更广,可以更好的了解车辆周边视线盲区。360全景影像分别在车头、车尾和车身侧边增加了多个广角摄像头,可以对同一时刻采集到的多路视频影像处理成一幅车辆周边360度的车身俯视图,然后在中控台的屏幕上显示,能让驾驶员实时在车内监控车外前、后、左、右视频画面的情况,避免意外事件发生,能更为直观、更为安全地驾驶车辆。360全景影像和全息影像区别:前者通过摄像头将实物呈现,后者通过光的物理衍射干涉现象将实物立体呈现。
为什么360全景影像大受欢迎呢?商业街道侧方停车360°全景影像的应用:比如,到商业中心购物,在拥挤的街道中将车辆泊入路边的停车位并不是件容易的事情。一方面是停车位比较狭小,像驾校那种一次就泊入成功的可能性不高,另一方面由于街道车道数量有限,在泊入环节中可能会随时遭受后方车辆的催促,对新手来说,一时间精神压力可能更大了,而360°全景影像功能在停车起到关键作用,它让泊车变得十分容易。启动360°全景影像,泊入位置和泊入距离就一清二楚,不需要周围管理员的指挥或探头观察距离,只要按照俯视角度的视像,保持好和周围物体的间距,倒车——修正方向——泊入成功,行云流水,甚至不留给后方车辆催促的时间。汽车360度全景摄像头到底是个什么原理?广州360度全景摄像头厂家
360全景倒车影像可彻底消灭车辆周围的视觉盲点。物流车多路360全景影像安装
360度全景影像系统在摄像机内参标定部分,考虑制作标定工具取代手工作业,配合相应的算法进行摄像机标定。在摄像机外参标定部分,将打破传统的标定方法,引入进化计算的思想优化算法,在不影响标定精度的前提下简化标定流程、缩短标定时间。在图像拼接部分,因为不同摄像机成像系统的差异导致相同时间坐标点的成像也会有所偏差,所以舍弃利用相关点配准再融合的方法,并直接根据人眼视觉模型,采用视觉过渡的方法对图像进行拼接融合。具体的实施步骤:(1) 图像的获取:利用170度以上超广角摄像机获取模拟信号,并将信号解析为图像数据;(2) 摄像机标定模型的建立:建立世界坐标与摄像机坐标的关系,建立摄像机坐标与图像坐标的关系,从而确定世界坐标与图像坐标的关系。物流车多路360全景影像安装
上一篇: 矿车360影像系统采购
下一篇: 8路360全景系统生产厂家