浙江SL2型LPV系列同步顶升系统伺服控制
同步顶升设备基本概念:“同步点”与“顶升点”的区别:3、油缸间关系:同步点:每个“同步点”处的多个油缸,油路互相串通。顶升点:每个“顶升点”只有一个油缸。传感器数量:一个位移传感器。不一定有位移传感器。设备采用闭环同步控制。由电脑控制台发出指令,液压泵站和液压油缸执行动作,传感器反馈信息给电脑控制台进行汇总运算并纠正同步差值,实现位移高精度同步。同步控制点常规为4点,8点,12点,20点,可至100点。可选型组成系统完成复杂的同步工况。同步精度由精密制造保证,任何操作人员只需10分钟即可熟练操作。浙江SL2型LPV系列同步顶升系统伺服控制
同步顶升系统
SL3型SP系列伺服控制智能型超高精度同步顶升与精确定位系统:额定压力单路max小供油量:0.022ml;低压供油流量:210ml/min;同步控制方式:多点位移同步/多点力同步与单独的控制。同步控制策略:比例伺服控制、传感器参与闭环控制。为核电站的转子与低压内缸之间的”碰缸“工作开发的控制系统,能在垂直顶升和水平伸缩进行同步精度和定位精度为0.01mm的位移精确控制。为核电站的转子与低压内缸之间的”碰缸“工作开发的**控制系统,在系统进行智能化自动执行前,通过触摸屏的界面进行相关的参数设置。浙江同步顶升系统多点多泵容积操作方式:工业触摸屏本地或远程控制。

SL3型SP系列伺服控制智能型超高精度同步顶升与精确定位系统 , 具备 “多段速度管理” 功能,可以在控制界面输入多段的 “时间-位移” 参数,系统将会自动执行不同时间段或者位移段的不同速度,并自动实现匀速运动。同时具备 “多段压力管理” 功能, 可以在控制界面输入多段的 “时间-压力” 参数,系统将会自动执行不同时间段的压力上升下降与持续稳压,智能程序自动管理全过程。系统响应速度快,同步升降平缓而无冲击,升降和伸缩具备同样的比较高精度,适用于慢速而高精度控制的工况场合。
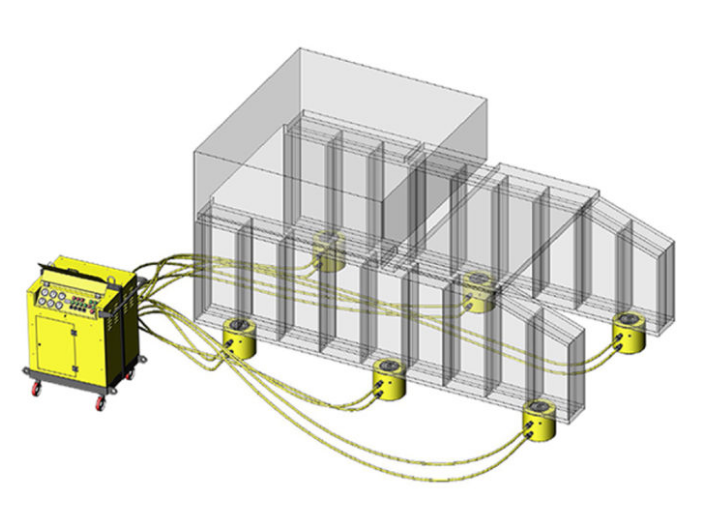
SL1型LP系列电脑控制多点同步顶升设备,通讯总线组网方式,一根通讯总线采用快插方式串联连接同步控制台和多台同步泵站的PLC子站进行全部信息的通讯。模块化设计,每个单独液压单元为一个模块。同步泵站,液压油缸,压力传感器,位移传感器和液压软管等组成一个同步顶升和下降的单元,每个单独单元之间采用通讯总线串联并与同步控制台连接,组成完整系统。上海耐斯特液压设备有限公司为您提供基于超高压液压和智能程序控制,机电液集成的产品、设备及精细控制解决方案,欢迎咨询。大直径轮子,便于快速移动。
SL5型VP系列容积同步多点高精度同步顶升设备技术性能:多点同步精度:1%,2%,5%;同步点数:4,6,8,12点;额定压力:21,70Mpa;同步方式:等容积同步;操作方式:按钮操作,有线遥控,无线遥控;连接方式:快速插头连接;设备特点:同步精度高达1%,自动同步,操作便利。系统特点:等容积同步;同步系统操作方式:数字显示仪触摸屏设置按钮操作。同步精度类别:高精度。位移同步max精度:1%-5%FS;位移定位max精度:1%-5%FS。欢迎咨询上海耐斯特液压设备有限公司。同步控制策略:闭环控制。上海SL2型LPV系列同步顶升系统PLC控制
伺服控制多路智能电动液压泵站配置远程连接接口,因此设备可以通过网线智总总控台连接进行远程操作和监控。浙江SL2型LPV系列同步顶升系统伺服控制
SL3型SP系列伺服控制智能型超高精度同步顶升与精确定位系统技术类型:归属系列:SP系列;系统特点:程序控制伺服控制闭环同步;同步系统操作方式:工业型电脑触摸屏设置按钮操作;同步精度类别:超高精度;位移同步max精度:0.01mm;位移定位max精度:0.01mm;力同步控制精度:0.05MPa;同步速度:常规速度30mm/min,慢速度3mm/min:控制策略闭环控制策略传感器反馈型。传感器策略:传感器参与显示和控制过程。同步精度实现策略:伺服电机程序智能管理。浙江SL2型LPV系列同步顶升系统伺服控制
上海耐斯特液压设备有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在上海市等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来上海耐斯特液压设备供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!
上一篇: 浙江SL多型多系列同步顶升系统
下一篇: 河北SPS系列同步顶升系统多点容积同步