安徽松下伺服电机驱动系统
松下伺服电机,关于驱动器:
关于驱动器1在使用之前各部分的名称A~B型充电指示灯前面板2连接器XA:电源输入连接器05JFAT-SAXGGKK-A(日本压着端子制造株式会社)连接器X1:USB连接器连接器X2:串行通信用主电源输入端子连接器X3:安全功能用连接器控制电源输入端子连接器X4:接口连接器再生电阻连接端子NP连接器X5:3B外部位移传感器连接器电机连接端子连接器XB:电机连接器06JFAT-SAXGGKK-A(日本压着端子制造株式会社)连接器X6:编码器连接器安全插头接地端子(2处) 松下伺服电机400W高惯量MHMF042L1U2M/V2M刹车。安徽松下伺服电机驱动系统
松下伺服电机
松下伺服电机A6系列,控制输入输出信号的耐噪音性的提高
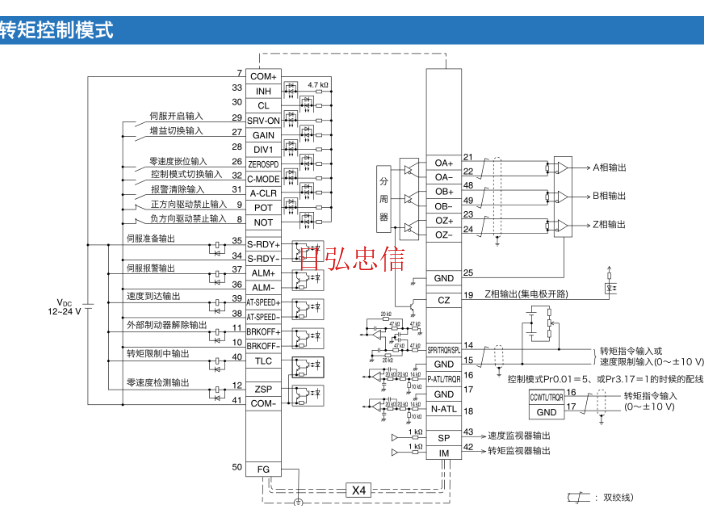
控制输入输出时,噪音入侵是导致定位位置偏差、输入输出信号产生错误动作的原因。·X1~X6为二次电路,一次电源(控制电源用直流电源DC24V和制动器用直流电源DC24V以及再生电阻用直流电源DC24V)之间需要进行隔离,请勿连接相同的电源和地。反之则会成为输入输出信号错误动作的原因。·控制电源(特别是DC24V)和外部的操作电源分开使用电源。特别注意请勿将两个电源的地线相互连接。·信号线请使用屏蔽线,屏蔽线两端请接地。 江苏松下伺服电机脉冲总和松下伺服100W脉冲型驱动器MADLN05SE。
松下伺服电机,位置控制型:
制振控制同时可使用**多3个模型型制振滤波器同时可使用**多2个2自由度控制可使用负载变动抑制控制可使用位置比较输出功能可使用【条件】Block动作有效设定增量式模式时原点复位完成状态(Block动作原点复位无效化设定为无效设定时)全闭环控制时外部位移传感器位置信息监视器功能不可使用Block动作可使用*1控制输入内部指令速度选择1、内部指令速度选择2、内部指令速度选择3、零速箝位等控制输出速度到达等内部速度指令可根据控制输入切换8个内部速度。软启动/断电功能可分别设定加速·减速,S型加减速亦可。零速箝位根据零速箝位输入,可将内部速度指令固定为0。2自由度控制可使用负载变动抑制控制可使用位置比较输出功能可使用【条件】Block动作有效设定增量式模式时原点复位完成状态(Block动作原点复位无效化设定为无效设定时)全闭环控制时外部位移传感器位置信息监视器功能不可使用Block动作可使用*1
松下伺服电机,**设备构成:
在安装连接器XB的连接电缆时,请根据所需调整电缆前端的被覆长度。固定铁氧体磁环时请防止给电缆施加过度的压力。〈铁氧体磁环的安装方法〉信号线请在铁氧体磁环上卷入必要卷数的信号线。电源线附带线护套(外皮)的情况下,必须去除铁氧体磁环(包括电源线**)安装部分的线护套。将整理好的L1、L2、L3线装入铁氧体磁环以达到降低噪音的效果。没有效果的情况下,请实施增加铁氧体磁环(包括电源线**)等处置对策。(请参照下图)电机线在本公司推荐的选购电缆上安装铁氧体磁环(包括电机线**)时,须去除安装部分的线护套(外皮)。将整理好的U、V、W线装入铁氧体磁环达到降低噪音的效果。没有效果的情况下,请实施增加信号用铁氧体磁环(包括电机线**)等处置对策。(请参照下图)编码器线请在铁氧体磁环上卷入必要卷数的编码器线。 松下伺服电机报警44.0。
请留足够的空间,以便有效地降温。●为保证控制柜内的温度分布均匀,请安装风扇。●D〜F型的下侧,G、H型的上、下侧安装有冷却风扇。2●控制柜内的环境,请遵守前述的环境条件。风扇控制盘内风扇100mm以上340mmaaa40mm以上以上机型名称a100mmA〜H型10mm以上内置冷却风扇的风向以上(D~F型)4驱动器安装部位有保护膜时,剥掉保护膜后再安装,自己制作安装工具时,请进行导电性镀层处理,这样有助于防止噪音。驱动器安装部位有保护膜时,剥掉保护膜后再安装,自己制作安装工具时,请进行导电性镀层处理,这样有助于防止噪音。松下伺服电机选型资料,调试软件下载。湖南松下伺服电机定位超时
松下伺服电机750W电机参数是多少。安徽松下伺服电机驱动系统
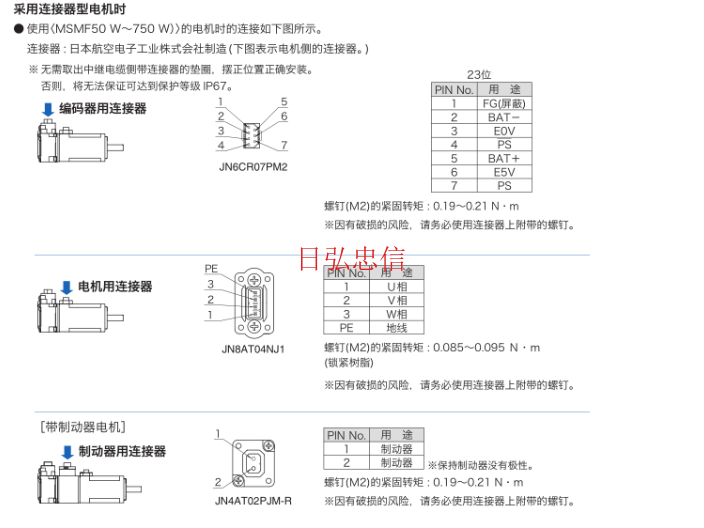
松下伺服电机,连接示例(E型的情况 )
请施加铭牌上所示的电压。对称电流为5000Arms以下。漏电断路器电源:高电压部分(需客户准备)个人电脑电源的短路电流超过此值时,请安装限流装置(限流保险丝或限流制动器、变压器等)限制短路操作杆电流使用。连接器接线时使用。接线后请保管,必要时使用。(接线的方法参照安装调试软件「PANATERM」■电源输入连接器的配线(XA)P.2-39)可从本公司网站下载。请务必安装与电源容量配线断路器(MCCB)为了保护电源线路,●连接输入电源连接器XA的配线P.2-22L1(5PIN)(红色LED)*1充电指示灯●连接到个人电脑(PANATERM)连接器X1的配线P.2-40相匹配的配线断路器L2(4PIN)连接器X2的配线P.2-40以作为过电流保护装置。L3(3PIN)●通过RS485·RS232连接到上位控制器噪音滤波器(NF)L1C(2PIN)连接器X3的配线P.2-42抵御从电源线路产生L2C(1PIN)●与具有安全功能上位控制器的连接的外部噪音。另外,降低来自驱动器的噪音干扰。短接线(RB-B)电磁接触器(MC)接通/断开驱动器的主电源,连接器XB的配线P.2-22连接器X4的配线P.2-43●的配线P.2-44运转、停止操作。W相(黑)●连接到外部位移传感器※记载的颜色为电抗器(L)选配电缆的情况时。 安徽松下伺服电机驱动系统
深圳日弘忠信,2017-08-04正式启动,成立了松下伺服电机,松下传感器及PLC,精密行星减速机,伙伴气动元件等几大市场布局,应对行业变化,顺应市场趋势发展,在创新中寻求突破,进而提升松下,纽格尔减速机,伙伴气动的市场竞争力,把握市场机遇,推动机械及行业设备产业的进步。深圳日弘忠信经营业绩遍布国内诸多地区地区,业务布局涵盖松下伺服电机,松下传感器及PLC,精密行星减速机,伙伴气动元件等板块。同时,企业针对用户,在松下伺服电机,松下传感器及PLC,精密行星减速机,伙伴气动元件等几大领域,提供更多、更丰富的机械及行业设备产品,进一步为全国更多单位和企业提供更具针对性的机械及行业设备服务。公司坐落于深圳市宝安区新安街道大浪社区新安三路一巷24号汇聚宝安湾智创园B、C栋B栋4层,业务覆盖于全国多个省市和地区。持续多年业务创收,进一步为当地经济、社会协调发展做出了贡献。
上一篇: 湖南松下伺服电机回收
下一篇: 山西松下伺服电机保护开关