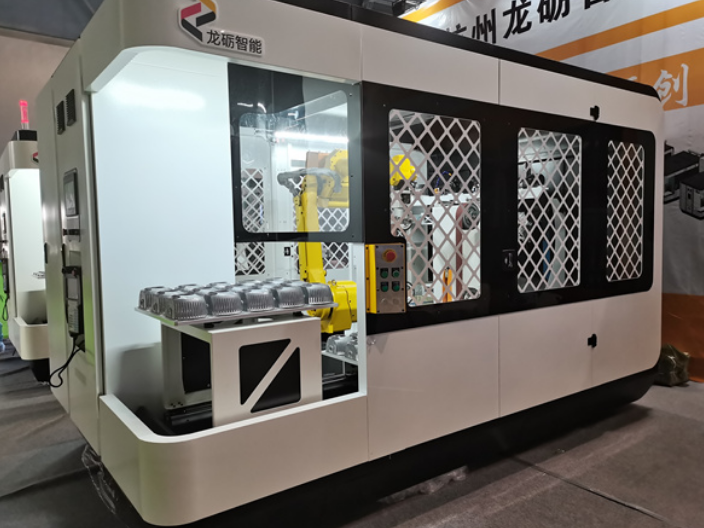
南通机器人自动打磨抛光
在我国,大部分工件去毛刺加工仍主要依赖手工操作,或者使用手持气动、电动工具进行打磨、研磨、锉等作业。这些方式不仅效率低下,还可能导致产品不良率上升,加工后的产品表面粗糙度不均匀,难以满足现代化工业生产对产品质量和效率的高要求。近年来,随着科技的发展,越来越多的企业开始寻求更加高效、精确的打磨解决方案。自动化打磨技术逐渐成为行业的新宠,其中,机器人打磨技术的应用尤为普遍。机器人打磨主要有两种形式:一是机器人装载加工主轴,工件固定;二是机器人抓取工件,加工主轴固定。这两种方式均是当前主流的自动化打磨方案,它们能够大幅提高打磨效率和精度,降低产品不良率,同时减少人工操作带来的健康风险。抛光机打磨机具备自动调整磨头速度功能,适应不同抛光需求。南通机器人自动打磨抛光
打磨
智能操控则是未来机器人技术的重要发展方向。通过引入人工智能、机器学习等先进技术,使打磨机器人能自主识别工件的形状、材质和表面状况,并自动选择合适的打磨策略和参数,从而实现高度自动化、智能化的打磨作业。打磨机器人的多样化操控方式使其能适应各种不同的作业需求,从而在市场中占据重要地位。而随着技术的不断发展,我们可以期待打磨机器人在未来能发挥出更大的潜力,为工业生产和人类生活带来更多的便利和价值。安全,这是一个相对于人类与财产而言的至关重要的概念。对于人类而言,确保安全意味着远离一切可能带来伤害或损害的环境。在这一点上,机器换人技术的出现扮演了关键的角色。它不仅能够有效地降低人类在危险环境中的暴露,而且通过自动化作业来保障人类的安全。表面打磨机厂家直供机器具备紧急停止按钮,保障工人安全。
在众多机器人应用中,像搬运和焊接这样的任务,大多都可以通过点到点的走轨迹方式实现,这使得机器人在这些领域的实现变得相对容易。然而,抛光打磨却是一个完全不同的挑战。在抛光打磨过程中,打磨的轻重完全依赖于工人的手感,而且每个产品都不可能完全一致,这就要求机器人必须具备像人一样感知和适应打磨状况的能力,以实现柔性化的抛光打磨。为了实现机器人的柔性化抛光打磨,力控柔性抛光打磨工具是必不可少的。其中的柔性力控打磨系统可以根据工作需要对末端工具进行重力补偿,并精确输出平行于机械臂轴向的接触力。这个装置还能根据接触表面的轮廓特征进行自适应伸缩,从而解决了接触面敏感特征工艺与快速接触移动之间的自动化难题。
对于需要在受限环境中与环境产生力交互的机器人任务,结合位置控制和力控制是非常必要的。这样不仅可以确保机器人能够精确地执行其任务,还可以保护机器人和周围环境免受潜在伤害。打磨,作为一种普遍应用的表面改性技术,对于提升产品质量和性能具有关键性作用。传统的打磨方法主要依赖人工完成,但这种方法效率低下,工作周期长,且精度难以保证,导致产品的一致性和均一性受到严重影响。人工去毛刺的过程中,不仅噪音大、速度慢,而且会产生大量粉尘,对操作人员的健康构成严重威胁。机器具备自动调整磨头压力功能,确保抛光效果。

柔性打磨力控系统能够确保批量生产中的工件表面效果更加均匀一致。这不仅有助于提升良率,减少不良品率,还能降低后续修磨成本,进一步压缩生产成本。该系统简化了机器人的编程示教过程,使得调试效率得到明显提高。这意味着操作人员无需具备高超的编程技能,也能轻松完成机器人的编程和调试工作,从而降低了对操作人员的要求,减少了人力成本。柔性打磨力控系统还具备数据存储和调用功能,使得打磨抛光过程可以纳入数字化产线系统。这一功能不仅有助于实现生产过程的数字化管理,还能提升生产数据的可追溯性,为企业的持续改进提供有力支持。适用于医疗器械、建筑五金等领域的金属件抛光。打磨操作台批发
设备维护简单,降低维修成本。南通机器人自动打磨抛光
在位置控制模式下,机器人会精确地按照预先设定的位置轨迹进行运动。然而,当机器人在运动过程中遇到障碍物并因此产生位置追踪误差时,它会试图通过增加作用力来追踪预设轨迹,这可能会导致机器人与障碍物之间产生巨大的内力。这种内力不仅可能损坏零件,还可能对机器人的结构造成损害。相比之下,力控制模式则更加注重机器人与障碍物之间的作用力控制。当机器人遇到障碍物时,力控制模式会智能地调整其预设位置轨迹,以消除由于障碍物产生的内力。这种调整确保了机器人与障碍物之间的作用力保持在安全范围内,从而避免了可能的损害。南通机器人自动打磨抛光