主动安全预警系统|主动安全预警系统BSD盲区监测|车辆主动安全预警系统
主动安全预警系统的BSD盲区预警功能与雷达的预警在多个方面存在明显区别,以下是具体分析:
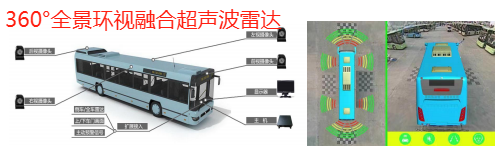
一、目的与应用场景BSD盲区预警功能主要目标:预防侧面碰撞事故,这类事故通常发生在车辆转弯或变道时,因为驾驶员无法直接观察到车辆侧面的情况,导致与其他车辆或障碍物发生碰撞。应用场景:BSD盲区监测系统通过毫米波雷达在车辆行驶时对车辆后方两侧盲区进行探测,可以在多个特定场景下触发,如左转弯、右转弯、倒车等。雷达预警倒车雷达:主要目标是辅助驾驶员进行倒车操作,提供车后方向的视野,帮助避免碰撞事故。它通常在倒车过程中工作,自动启动并提供后方障碍物的警告。预警雷达:属于远距离目标搜索雷达,用于发现远、中、近程弹道导弹等目标,测定其关键参数,为军SHI机关提供导弹预警情报。
二、对象识别与持续工作状态BSD盲区预警功能对象识别:BSD可以自动区分行人和普通障碍物,JIN对行人进行报警提醒,避免司机因长时间收到提示而产生疲劳或降低警惕性。持续工作状态:BSD从车辆点火开始至熄火全过程持续工作,能够为司机持续提供预警。雷达预警倒车雷达:无法区分行人和普通障碍物,只能提供简单的报警提醒。预警雷达:不涉及此方面功能,其关注重点在于远程目标的搜索与跟踪。
三、技术实现与触发机制BSD盲区预警功能技术实现:BSD盲区监测系统包括雷达、摄像头、控制电脑等组件,通过摄像头和雷达传递的信号来控制仪表报警以及后视镜片上的警示灯点亮。触发机制:当有其他车辆进入盲区范围内时,BSD系统会在后视镜或者指定位置对司机进行灯光提示和蜂鸣器报警。雷达预警倒车雷达:通过发射和接收超声波或电磁波来探测后方障碍物,并根据反射回来的信号判断障碍物的距离和位置。预警雷达:采用超高发射功率和大型电动扫描天线阵列,通过发射和接收电磁波来探测远程目标,并测定其关键参数。
综上所述,BSD盲区预警功能与雷达的预警在目的与应用场景、对象识别与持续工作状态以及技术实现与触发机制等方面都存在明显差异。BSD盲区预警功能更侧重于保护车辆在日常行驶中的安全,而雷达预警则具有更广泛的应用范围和技术特点。
上一篇: 内蒙古小车司机行为检测预警系统