东莞机器人点胶系统企业
当胶水固化后不粘贴或发生其他不良情况时,可以采取以下几种方法进行处理:检查固化时间和环境条件:检查胶水固化的时间是否足够长,并确认胶水固化时的环境温度、湿度等条件是否符合要求。如果固化时间不足或环境条件不适合,需要导致胶水固化不完全或质量不理想。检查胶水选择:胶水的选择对于粘附效果至关重要。确保选择的胶水与被粘合材料相匹配,并符合所需的强度、耐热性、耐化学性等要求。有时候需要根据实际情况进行胶水的调整或更换。清洁和准备表面:确保被粘合的表面清洁干净,并采取适当的方法进行预处理,如去除油污、灰尘或氧化层等。准备表面可以提高胶水与被粘合材料之间的黏附性。考虑使用辅助粘合剂或增强材料:有时需要使用辅助粘合剂或增强材料来提高粘附效果。例如,可以使用底漆、粘接剂剂型或增强纤维等,以提供更好的粘附性和结构强度。点胶过程工艺控制是影响点胶效果的关键因素之一。东莞机器人点胶系统企业
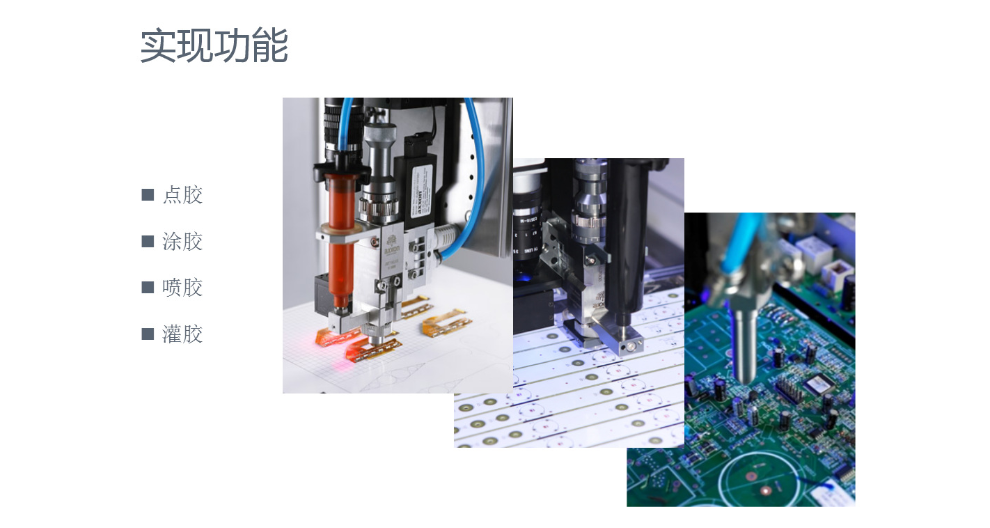
点胶系统普遍应用于工业生产中的涂胶、密封、粘接等工艺中。根据不同的需求和应用场景,点胶系统可以分为以下几种类型:手动点胶系统:这是非常简单、很常见的点胶系统类型。操作人员使用手动点胶枪或手动控制阀门来控制胶水的喷涂。手动点胶系统适用于小规模生产、样品制作和简单的点胶任务。半自动点胶系统:半自动点胶系统在手动操作的基础上增加了一些自动化的辅助设备,例如,使用脚踏开关或按钮进行喷胶操作,或者使用简单的程序控制器来控制喷胶过程。半自动点胶系统通常用于中等规模生产,可以提高生产效率和一致性。全自动点胶系统:全自动点胶系统是较好别的点胶系统,具有高度的自动化程度。全自动点胶系统通过使用先进的机器视觉系统、机器人和自动控制软件,能够实现高速、高精度的自动化点胶操作。全自动点胶系统适用于大规模生产和复杂的点胶工艺。中山流水线点胶系统厂点胶系统的效率对于提高生产线的整体效益至关重要。

点胶系统一般不会对环境造成直接危害,因为大多数点胶材料在固化后是稳定的。然而,考虑到点胶过程中需要产生的废弃物和废水,以及点胶材料的成分,仍需谨慎处理和管理,以防止对环境造成负面影响。以下是一些需要需要考虑的方面:挥发性有机化合物(VOC)排放: 有些点胶材料需要含有挥发性有机化合物(VOC),在点胶过程中挥发到空气中。这需要对室内空气质量造成影响,且一些 VOC 对环境和健康有害。因此,在使用这些材料时需要确保良好的通风系统。废弃物处理: 废弃的点胶材料、废胶管、废胶枪等需要产生废弃物,这些废弃物的处理需要符合当地的环保法规。合理分类、回收和处理这些废弃物非常重要。水处理: 一些点胶系统需要需要使用水来清洗设备或处理产生的废水。确保水的处理方式符合环保标准,避免将有害物质排放到水体中。
在大量生产中,点胶系统可以采取以下措施来提高效率:自动化操作:采用自动化的点胶系统可以实现高速、连续、准确的点胶操作,节省人力资源并提高生产效率。可以使用机器人或自动化设备来执行点胶任务,减少人工操作的不确定性和时间消耗。多工位设计:如果生产需求较大,可以考虑在生产线上设置多个点胶工位,使多个产品同时进行点胶操作,从而缩短生产周期。这样可以减少等待时间和任务切换的时间浪费。快速切换和调整:点胶系统应具备快速切换和调整的能力,以适应不同产品和工艺的要求。这样可以减少设备停机时间和调整时间,提高生产效率。自动喷嘴清洗和维护:定期清洗和维护点胶系统中的喷嘴和配件是保持系统高效运行的关键。现代的点胶系统通常具备自动清洗功能,可以减少人工维护时间并降低生产停机时间。带有“视觉”功能的全自动视觉点胶机,视觉即具有人眼功能的作用。

点胶时出现拉丝、拖尾情况怎么办?视觉点胶机在各个领域应用非常普遍,但在使用时或多或少都会遇到点胶机拉丝、拖尾的情况,那么这种情况该如何解决呢?其实啊,出现这种情况可能是:胶水黏度过高、胶水流动不畅、点胶针头或压力不合适、移动速度过快、点胶距离过大等原因,而想要有效解决这些问题,你只需用到旗众智能点胶控制系统。旗众智能点胶控制系统对于这一问题,针对性的提供了几点解决方案:"1、拉丝方式:对不同的胶水和工艺,可以选择不同的拉丝方式来处理,旗众智能视觉点胶系统就搭载了普通上抬、斜拉上抬等7种拉丝处理方式2、距离控制:用户可在软件工艺参数中通过设置详细的拉丝高度、长度、关胶距离来处理3、时间控制:软件提供了开胶延时、关胶延时、开胶前延时、关胶前延等参数设置,用户可根据具体需求来设置"。高精度的点胶系统可以帮助减少废品和成本。东莞机器人点胶系统企业
点胶系统的使用可以减少手动操作过程中的误差。东莞机器人点胶系统企业
机器人流水线跟随点胶系统:机器人流水线跟随点胶系统是旗众智能专为基础机器人流水线点胶加工而研发的一套系统。可以自动跟踪,视觉定位识别点胶的区域,然后进行点胶位置的自动补偿,实现对点位的追踪,快速准确机器人通过视觉自动抓拍产品的坐标信息,实现对输送带上产品的动态跟踪和高精度的随动点胶,使得它可在极小的缝隙间很好地完成点胶工作。准确点胶的前提是什么?规划轨迹转换为现实轨迹,是准确点胶的前提。那么如何保证转换的效果呢?可以借助一站式自动标定方案,主要包括以下两点:1、机台初始标定,精度偏差0.02毫米2、胶头与工件的位置标定,使用2D或3D视觉识别,快速获取点胶头和工件的实际安装位置,偏差精度0.02毫米。 东莞机器人点胶系统企业
上一篇: 中山流水线点胶系统
下一篇: 中山高精视觉点胶系统公司电话