山东警用巡逻无人船艇成交价
现有的船舶推进器,包括传统的舵桨推进、吊舱推进器、喷水推进器等大都是通过发动机带动螺旋桨叶片转动产生推力。基于船体布置的考虑,船舶主机和螺旋桨之间需要轴系进行传动,轴系传动导致在传递过程中损耗增大,传动效率降低,轴系还会占据大量船舱空间,降低船舱利用效率。
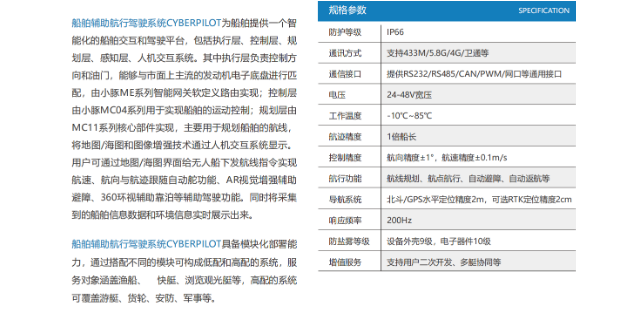
推进轴系对于水密工艺要求较高,导致结构日趋复杂,增大船舶的设计和制造难度。同时,对于某些有特定用途的水下航行器来说,轴系震动会带来大量噪声,不利于任务的执行。随着人工智能、无人系统等新型行业的兴起,无人船作为一种新型的水面智能装备正逐步走入人们的视野,由于无人船在设计的时候多是有着明确的任务用途,无人船的自主航行也需要大量的感知传感器、控制计算单元,对于船舶的设计提出了更高的要求,传统的推进器受制于本身的布置局限性、噪音局限性并不能满足无人船的需求。因此,人们逐渐将目光转向无轴推进系统 小豚智能自主研制的“智能船舶辅助驾驶系统CYBERPILOT”具备了模块化部署能力。山东警用巡逻无人船艇成交价
无人船艇
无人船艇可用于海洋环境监测、预报及保护。在环境监测方面,无人船艇可以长时间、大范围地监测海洋环境,收集数据以评估海洋污染程度和污染物类型。
在预报方面,无人船艇可以通过收集到的数据对海洋气候进行预测,为渔业、沿海地区和海上交通提供重要参考。
在保护方面,无人船艇有助于监测和保护海洋生态系统,为海洋生态环境的恢复和发展提供支持。
无人船艇在海洋科学调查、研究及开发方面具有广泛的应用价值。在科学调查方面,无人船艇可以深入海洋进行探测,收集海洋地质、水文、生物等各类数据,为科学研究提供宝贵资料。
例如,某国际海底科学研究项目中,无人船艇被用于探索深海未知领域,成功发现了新型海洋生物和海底地质结构。在研究和开发方面,无人船艇为各种海洋技术的实验和测试提供了便利条件。
例如,在海洋新能源技术的研究中,无人船艇可以用于测试和优化波浪能、潮汐能等新能源设备的性能,为海洋能源的开发和利用提供支持。 吉林水文测量无人船艇服务小豚智能突破了无人船动力、感知、控制、交互等关键技术。
随着科技的不断进步和市场需求的发展,无人船艇在未来将迎来更加广阔的发展空间。以下是一些未来的发展趋势和前景:技术创新:随着人工智能、传感器技术、导航系统等关键技术的不断进步,无人船艇的自主性和可靠性将得到进一步提升。
例如,通过引入更先进的导航系统和传感器技术,无人船艇将能够更好地感知周围环境,提高航行的安全性。市场需求增长:随着海洋产业的不断发展,人们对海洋资源的需求和对海洋环境的保护意识将不断增强。这将推动无人船艇在海洋监测、环境保护、应急救援等领域发挥更大的作用,进一步拓展其应用范围。
无人船艇,也称为自主船只或无人驾驶船只,是指在没有人类直接参与的情况下,依靠内置的程序、传感器、导航系统等设备进行航行的船只。无人船艇通常由船体、动力系统、导航系统、控制系统和传感器等组成,具有高度的自主性和灵活性。
随着科技的不断发展,无人船艇逐渐成为海洋监测、环境检测、救援和等领域的重要工具。本文将详细阐述无人船艇的概念、组成、应用场景、优势及其发展现状和前景。
目前无人船艇在我国有着多种运用方案与多种不同的运用场景。海洋监测:无人船艇可以用于海洋环境监测,收集水温、盐度、水质、海流等数据,并进行实时传输。此外,无人船艇还可以监测海洋污染,如油污、重金属污染等。
环境检测:无人船艇可以用于检测水体中的有害物质,如重金属、有机污染物等,为环境保护提供数据支持。
救援:在灾难发生时,无人船艇可以快速到达事故现场,进行人员救援、物资运输等工作。例如,在2011年日本福岛核事故中,无人船艇被用于辐射水平监测和清理工作。
小豚智能在东莞的发展历程,正是高校科研成果青苹果转换成生产应用红苹果的生动实践船舶智能化改造。

团队主要开展全自主无人艇关键技术研究,已突破复杂环境感知认知与目标追踪、路径规划与自主控制、无人艇-机集群协同等多项关键技术,牵头制定国家标准4件、获授权发明专利30件,在NatureComm,NSR等发表SCI一区论文57篇,被Nature.Physics研究亮点报导。
2017年以来创造16.8亿元的经济效益。开发了HUSTER-12、HUSTER-12S、HUSTER-68、HUSTER-30四个型号无人艇、多型号艇载无人机,以及跨域协同、多源信息融合感知、矢量喷推与运动控制等功能部件,覆盖了远海、近海、港区及内河湖的任务需求。获得广东省技术发明一等奖、日内瓦国际发明展金奖、ICIRA2018比较好论文奖等。 小豚智能利用混合式通讯和智能化控制等技术手段,构建船舶数据流动的基础架构。山西警用巡逻无人船艇有哪些
小豚无人船喷水推进器喷管方向可变,便于船舶操纵。山东警用巡逻无人船艇成交价
无人船艇的组成结构和工作原理是实现其自主航行和任务执行的关键。以下是无人船艇的详细描述:组成结构:无人船艇通常由船体、传感器系统、自动控制系统、通信系统、动力系统等组成。其中,传感器系统用于感知周围环境,如水温、水位、流速等;自动控制系统用于控制船体的航行和任务执行;通信系统用于与岸上控制中心进行数据传输和指令接收;动力系统用于提供船只航行的动力。
工作原理:无人船艇的工作原理主要涉及航行控制和任务执行两个环节。在航行控制方面,无人船艇依靠传感器系统获取周围环境信息,通过自动控制系统进行分析和处理,生成航行指令,控制船体按照预定轨迹航行。
在任务执行方面,无人船艇可以根据任务需求配备不同的传感器和设备,如水下探测器、水质监测器、图像采集器等,通过自动控制系统执行相应的任务。 山东警用巡逻无人船艇成交价
上一篇: 警用巡逻无人船艇
下一篇: 山西辅助驾驶系统无人船艇修理