山东电力化工巡检机器人工程
在公共救援领域,巡检机器人是不可或缺的得力助手。它们配备了多重传感器、红外热成像、机械臂应用、音视频交互等功能,能够实现巡查、侦测、运输、救援等多种工作。无论是公共场所的突发事件,还是公共交通救援、地震救援等情况,巡检机器人都能迅速响应,为救援工作提供有力支持。巡检机器人不仅在消防、煤矿领域大显身手,还广泛应用于石油化工、天然气、电力电气等领域。它们能在恶劣环境下稳定工作,提高工作效率,减少人力成本。上海洲和智能科技有限公司致力于提供煤矿巡检机器人,期待您的光临!山东电力化工巡检机器人工程

巡检机器人在能源行业中拥有广泛的应用场景,以下列举了几个具体实例:在石油化工领域,巡检机器人发挥着至关重要的作用。面对高风险的作业环境,它们能够精确检查并监控石油存储设施、化学反应器等关键设备,确保生产流程的安全与稳定,从而有效避免潜在的安全事故。天然气行业中,巡检机器人同样展现出了强大的应用潜力。它们被部署在燃气站的关键和高风险区域,执行环境检查、火灾隐患排查、可疑人员检测等任务。此外,通过红外测温、燃气泄漏检测、声音分析和高清视频监控等功能,巡检机器人极大地提升了生产安全防护水平。在电力电气行业,巡检机器人已成为提升电力供应稳定性和安全性的重要工具。它们不仅能够检查电力设备和输电线路,监测设备的运行状态,还能预测和预防潜在的故障。这种预见性的维护策略有助于减少设备故障的发生,确保电力供应的连续性和可靠性。湖北智能巡检机器人报价智能机器巡检机器人,就选上海洲和智能科技有限公司,用户的信赖之选,有需要可以联系我司哦!
上海洲和智能科技有限公司凭借其创新能力,成功研发出了一系列适用于室内、室外及防爆环境的巡检机器人。这些机器人专为多种复杂场景设计,如繁忙的公共场所、工业密集的厂区、高风险的石油化工区域以及煤炭业等,展示了其适应性和实用性。这些巡检机器人集成了前列的传感器技术和先进的智能巡检系统,赋予了它们高度的自主性和智能化水平。它们能够自主规划巡检路径,高效地完成高精度、高灵活性的巡检任务。无论是在变幻莫测的室外环境中,还是在需要严格防爆的区域内,这些机器人都能稳定可靠地运行,为各行各业提供实时、精确的数据支持。上海洲和智能科技的巡检机器人凭借其性能和可靠性,成为了各行业安全生产和高效运营不可或缺的重要力量。它们不仅能够减轻人工巡检的负担,提高工作效率,还能在危险环境下保障人员的安全,降低事故风险。这些机器人的出现,无疑为各行各业的安全生产和运营带来了提升。
自主导航与定位导航技术:防爆巡检机器人采用激光导航、视觉导航或惯性导航等技术,实现自主导航和定位。这些技术能够确保机器人在复杂环境中准确规划路径、避开障碍物。定位技术:结合GPS、北斗等卫星定位系统和地面标志物,实现机器人在室外或室内环境中的精确定位。数据处理与通信数据处理:防爆巡检机器人内置高性能的数据处理单元,能够对收集到的数据进行即时分析、处理和存储。通过预设的规则或机器学习算法,机器人能够自动识别异常模式并发出预警。通信技术:采用4G/5G、WiFi等无线通信技术,实现机器人与控制中心之间的实时数据传输和通信。这确保了控制中心能够及时了解机器人的巡检情况和现场环境参数。上海洲和智能科技有限公司为您提供 AI巡检机器人,欢迎您的来电!

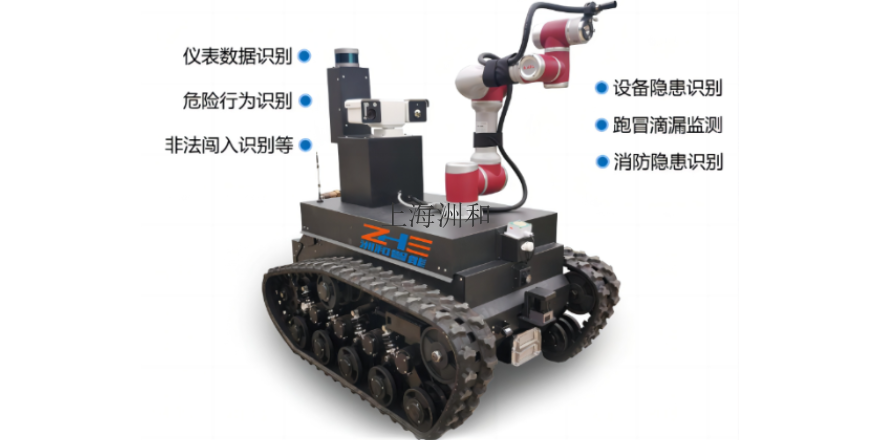
主要功能:宣传展示:机器人能够自主在室外环境中进行宣传展示,通过内置的显示屏或语音系统向公众传递信息。危险行为识别:配备高清摄像头和图像识别技术,实时检测并识别出各种危险行为,如攀爬、闯入禁区等,并发出警报。火灾识别:利用红外热成像技术检测环境温度异常,及时发现火灾隐患,并启动报警系统。设备运行状态识别:能够检测设备(如监控摄像头、照明设备等)的工作状态是否正常,一旦发现故障或异常,立即发送警报信息。语音交互:具备先进的语音交互系统,支持多种语言,提供信息查询、导航等服务。红外温度测量:配备红外测温模块,进行非接触式温度测量,快速准确地获取温度数据。动物闯入识别:通过摄像头和图像识别技术,实时检测并识别出动物闯入的情况。技术积累:洲和智能科技有限公司在技术服务、技术开发、技术咨询、技术交流、技术转让、技术推广等智能机器巡检机器人,就选上海洲和智能科技有限公司,用户的信赖之选。西藏园区巡检机器人方案
上海洲和智能科技有限公司致力于提供煤矿巡检机器人,欢迎新老客户来电!山东电力化工巡检机器人工程
巡检机器人在石油储罐的液位监测方面,拥有装载不同传感器的能力以进行精确检测。以下是几种可能的实现方式:激光测距传感器:巡检机器人可以配备激光测距传感器来监测石油储罐的液位。这种传感器通过发射激光束并接收其反射回来的信号,来测量液位与传感器之间的距离。激光束在空气中传播的速度是恒定的,因此通过计算激光从发射到接收的时间差,可以准确计算出液位的高度。压力传感器:另一种方法是使用压力传感器。通过在石油储罐底部安装压力传感器,机器人可以间接测量液位。随着液位的上升,储罐底部的压力也会相应增加。通过监测这种压力变化,并结合储罐的形状和尺寸,可以推算出液位的高度。红外液位传感器:巡检机器人也可以配备红外液位传感器来进行液位检测。这种传感器利用红外线的特性,通过发射红外光并接收其反射回来的信号,来测量液位。红外光在液体和空气之间的反射特性不同,因此可以通过分析反射信号来确定液位的位置。这些方法各有优势,可以根据具体的应用场景和需求选择合适的传感器进行液位监测,确保石油储罐的安全和稳定运行。山东电力化工巡检机器人工程
上一篇: 重庆城市巡检机器人工程
下一篇: 福建智能机器巡检机器人厂家