珠海松下伺服电机乱摆
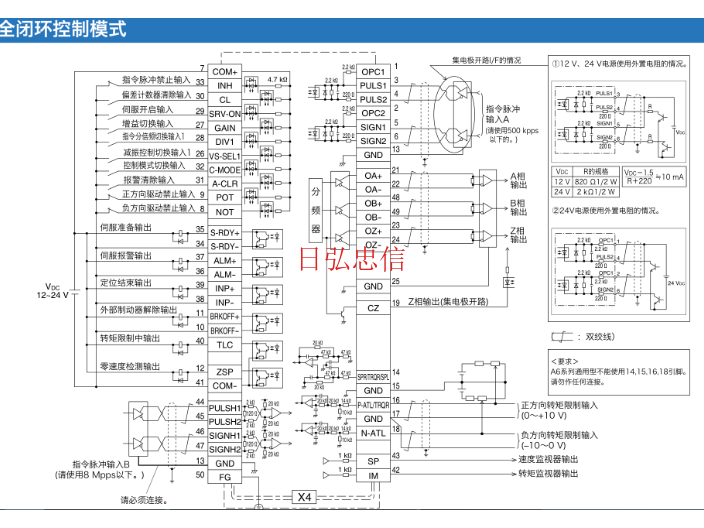
自动调整由上位的动作指令或由安装调试软件「PANATERM」发出的动作指令在电机驱动状态下,实时推测判定负载惯量,自动设定与刚性设定相对应的增益。反馈脉冲的分频功能脉冲数可任意设定。(但是,不能超过编码器反馈脉冲数)保护功能硬件错误过电压、电压不足、过速度、过负载、过热、过电流、编码器异常等软件错误位置偏差过大、指令脉冲分频、EEPROM异常等报警数据跟踪功能可参照报警数据的历史记录无限旋转***式功能可使用劣化诊断功能可使用控制输入偏差计数器***、指令脉冲禁止输入、指令分倍频切换、制振控制切换等控制输出定位结束等脉冲输入比较大指令脉冲频率数500kpulse/s(光电耦合器长线驱动器输入使用时)8Mpulse/s(长线接收器输入A相/B相使用时)输入脉冲信号形态差动输入。可根据参数选择。(①正方向/负方向②A相/B相③指令/方向)指令脉冲分倍频(电子齿轮比设定)指令脉冲频率数×电子齿轮比(1〜2301〜230)作为位置指令输入处理。但是,请使用电子齿轮比为1/1000〜8000倍。平滑滤波器对于指令输入可选择一次延迟滤波器或者FIR型滤波器松下伺服脉冲型驱动器走位置控制。珠海松下伺服电机乱摆
松下伺服电机
使用环境条件温度使用温度0℃〜55℃(无冻结)保存温度-20℃〜65℃(最高温度保证:80℃72小时无结露*1)湿度使用时和保存时均为20〜85%RH以下(无结露*1)海拔海拔1000m以下振动5.88m/s2以下,10〜60Hz(不可在共振频率下连续使用)控制方式IGBTPWM控制正弦波驱动方式编码器反馈23bit(8388608分辨率)7线串行绝对式编码器I/F控制信号输入通用输入10个根据参数选择通用输入的功能输出通用输出6个根据参数选择通用输出的功能模拟信号输出输出2个(模拟监视器输出2个)从I/F连接器的42PIN,43PIN输出。脉冲信号输入两种输入(光电耦合器输入、长线接收器输入)通过光电耦合器输入、可对应长线驱动器I/F·开路集电极I/F两种通过长线接收器输入、可对应长线驱动器I/F输出输出4个(长线驱动器输出3个、开路集电极输出1个)编码器反馈脉冲(A·B·Z相)通过长线驱动器输出。Z相脉冲也有集电极开路输出。通信功能USB可连接电脑进行参数设定、监视状态等。RS232可进行与上位控制器1:1的通信。RS485可进行与上位控制器1:n的通信。Modbus-RTU可进行与上位控制器1南京松下伺服电机设置松下伺服电机750W高惯量刹车电机MHMF082L1U2M/V2M。
松下伺服电机,驱动器安装方法(二):
请注意散热情况。驱动器随着电机的运转发热。在密封的控制箱里使用驱动器会导致控制箱内的温度异常升高,为了满足驱动器周围温度的使用范围,请考虑配置冷却装置。●电机以及与此匹配的驱动器发生故障时,可能会导致电机烧损,并产生冒烟或起尘。在无尘房等场所使用时,须注意。●高速运转时动态制动器动作的情况下,请设定10分钟左右的停止时间。若超过此使用条件的情况下、也有动态制动器断线、制动器不动作的可能发生。●电源整流电路的电容器会随着径点的变化而降低容量。为了防止发生故障造成二次灾害,推荐5年左右更换一次。请到本公司指定的商店更换。●使用前,请仔细阅读「安全准备指南」。
松下伺服电机的驱动器安装环境温度:
环境条件项目条件环境温度 10℃〜40℃(无冻结)环境湿度20%〜85%RH(无结露)储存温度*2-20℃〜65℃(最高温度保证:80℃72小时无结露*4)储存湿度20%〜85%RH(无结露*4)振动*电机5.0kW以下:旋转时49m/s2(5G)以下、停止时24.5m/s2(2.5G)以下超过5.0kW:旋转时24.5m/s2(2.5G)以下、停止时24.5m/s2(2.5G)以下撞击*电机98m/s2(10G)以下保护结构*3*电机(连接器型)IP67(使用了指定的电缆的情况下,但输出轴旋转部、电机连接器、编码器连接器的连接引脚部除外)5.5〜15.0kW:IP67(使用了指定的电缆的情况下,但编码器连接器的连接引脚部、电缆的驱动器侧、输出轴旋转部除外)22.0kW:IP44(使用了指定的电缆的情况下,但连接器的电缆连接部、端子箱的平板开孔后保护线路的金属圈口出线部、电缆的驱动器侧、输出轴旋转部除外)*电机(导线型)IP65(输出轴旋转部、电机连接器、编码器连接器的连接引脚部除外)海拔海拔1000m以下*1环境温度为距离电机5cm处的温度。*2包括运输在内的短时间容许温度。*3符合EN标准(EN60529、EN60034-5)所规定测试条件的电机。不适用于经常水洗等,需要长时间防水的环境。*4请注意温度降低湿度上升时,容易发生结露现象 松下伺服电机50W法兰低惯量38/高惯量40法兰。
松下伺服电机A6系列,输出轴的容许负载:
①请确保设置及运转时,施加在轴端的径向负载和轴向负载控制在各机型规定的容许值范围内。②请务必在安装刚性联轴器时加以注意。(过大弯曲负载会导致轴承损坏或降低使用寿命)③请尽量使用电机**的高刚性的挠性联轴器,以便将微小轴移而产生的径向负载控制在容许值范围内。各机型的输出轴的容许负载请参照P.1-33「输出轴的容许负载」
设置注意事项:
①在电机轴端安装或拆卸联轴器时,请勿使用铁锤直接敲击轴端。(若安装在反负载侧的轴端时会损伤编码器)②需充分同轴(否则会导致振动或损害轴承)。③电机轴在未接地的情况下运转时,根据电机情况及安装环境不同,可能会导致电机轴承发生电腐性和轴承声音过大等,请确认和检查。 松下伺服电机1KW/1.5KW/2KW/3KW/4KW/5KW套装。大连松下伺服电机调速范围
松下A6伺服电机电子齿轮比怎么设置。珠海松下伺服电机乱摆
松下伺服电机A6系列,可动部电缆配线时的注意事项:
拖链导轨配线时,请注意以下事项。●拖链导轨配线电缆的弯曲半径,请确保在电缆加工外径的10倍以上。(安装的外径,请参照P.1-26…安装的方法驱动器「电线粗细和容许电流的关系」的表格。)此外,拖链导轨内的配线,请勿进行固定或捆束。但是,如需固定电缆时,请在拖链导轨末端部分(未向电缆施加压力的拖链导轨部分)进行。(不可过分紧固)[拖链导轨的推荐配线状态]勿使电缆出现太长而呈松弛状态,或太短而施加张力的状态。否则会导致线表皮被拖链导轨内壁摩擦或容易出现于其他电缆缠绕在一起等各种不可预测的事故。 珠海松下伺服电机乱摆
深圳市日弘忠信实业有限责任公司是我国松下伺服电机,松下传感器及PLC,精密行星减速机,伙伴气动元件专业化较早的私营股份有限公司之一,深圳日弘忠信是我国机械及行业设备技术的研究和标准制定的重要参与者和贡献者。深圳日弘忠信致力于构建机械及行业设备自主创新的竞争力,产品已销往多个国家和地区,被国内外众多企业和客户所认可。
上一篇: 南通松下伺服电机供货企业
下一篇: 扬州松下伺服电机扭矩反馈